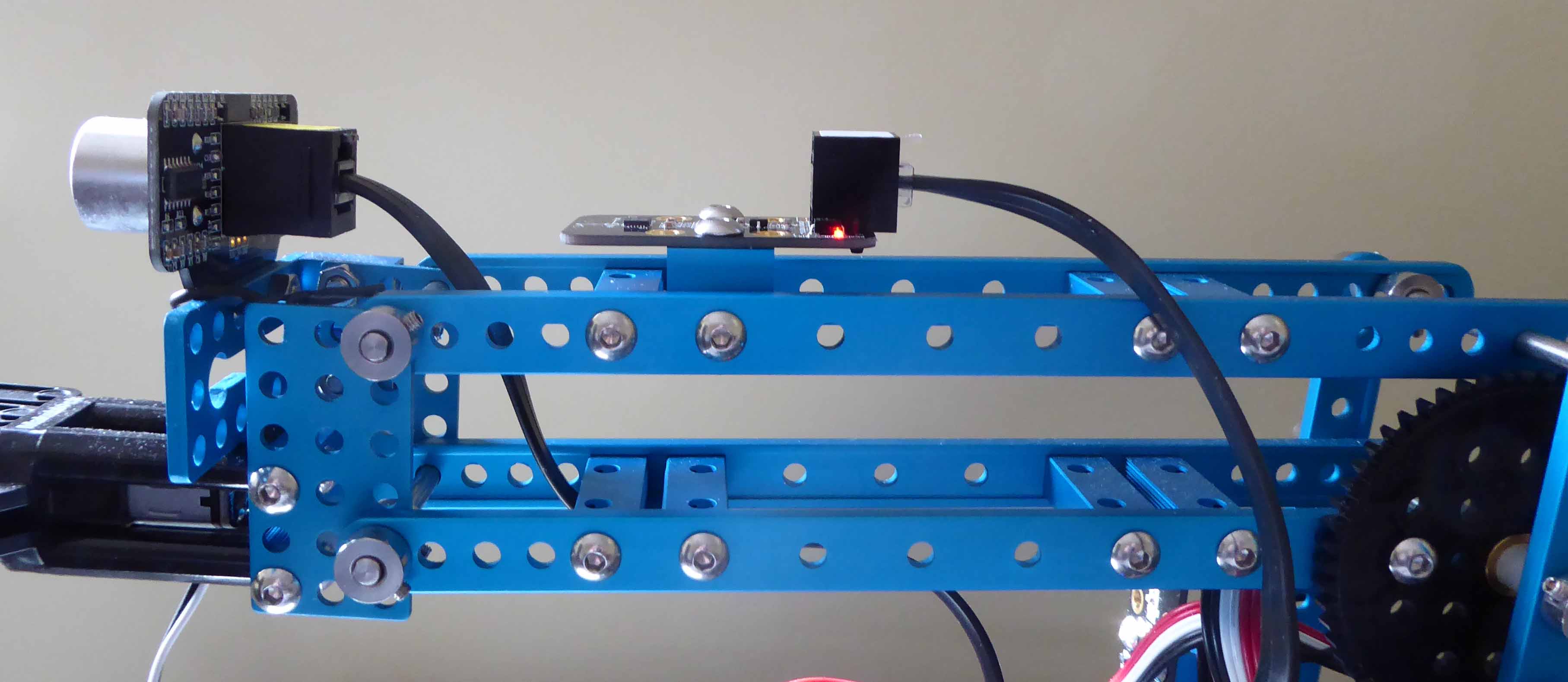
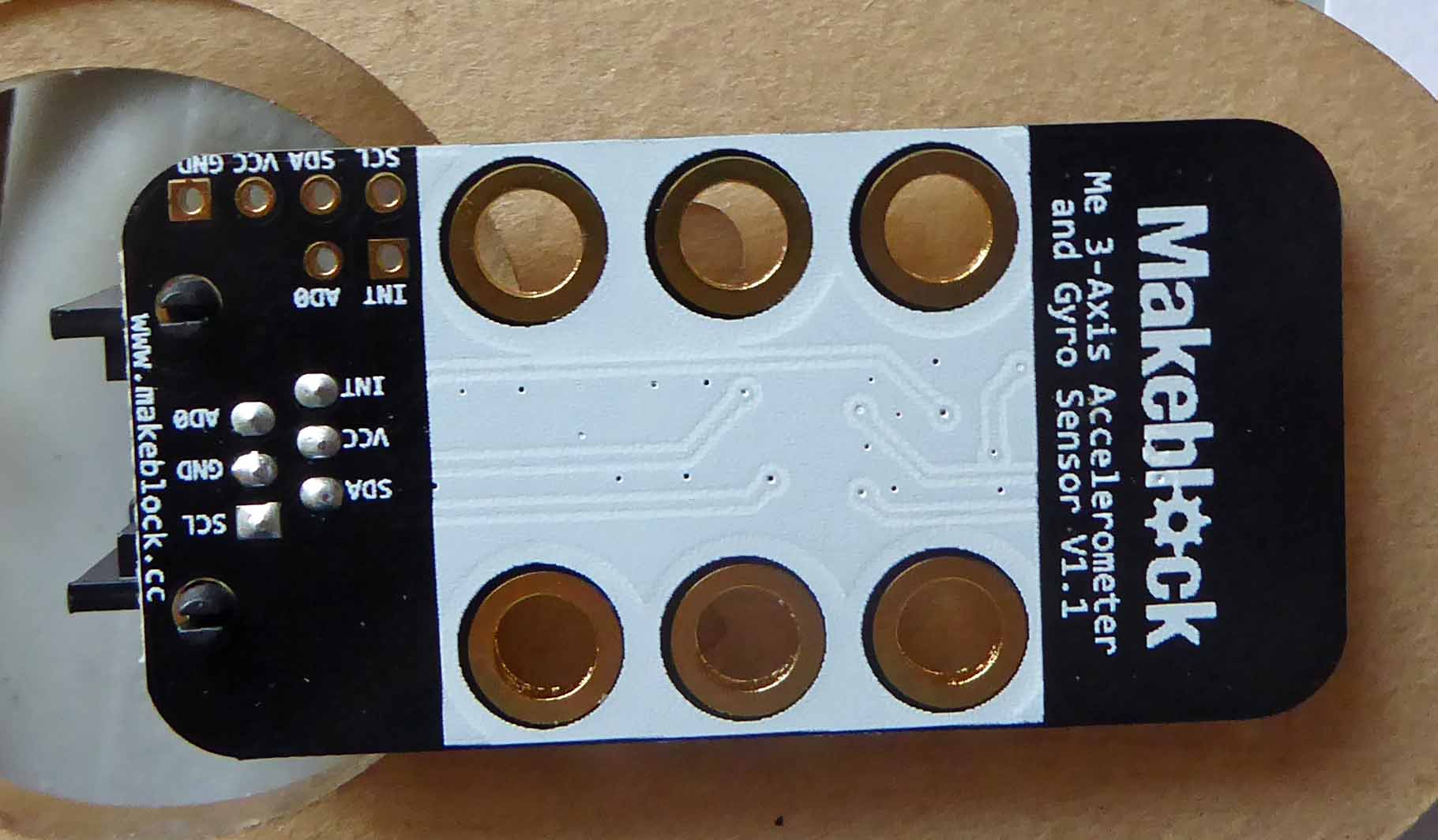
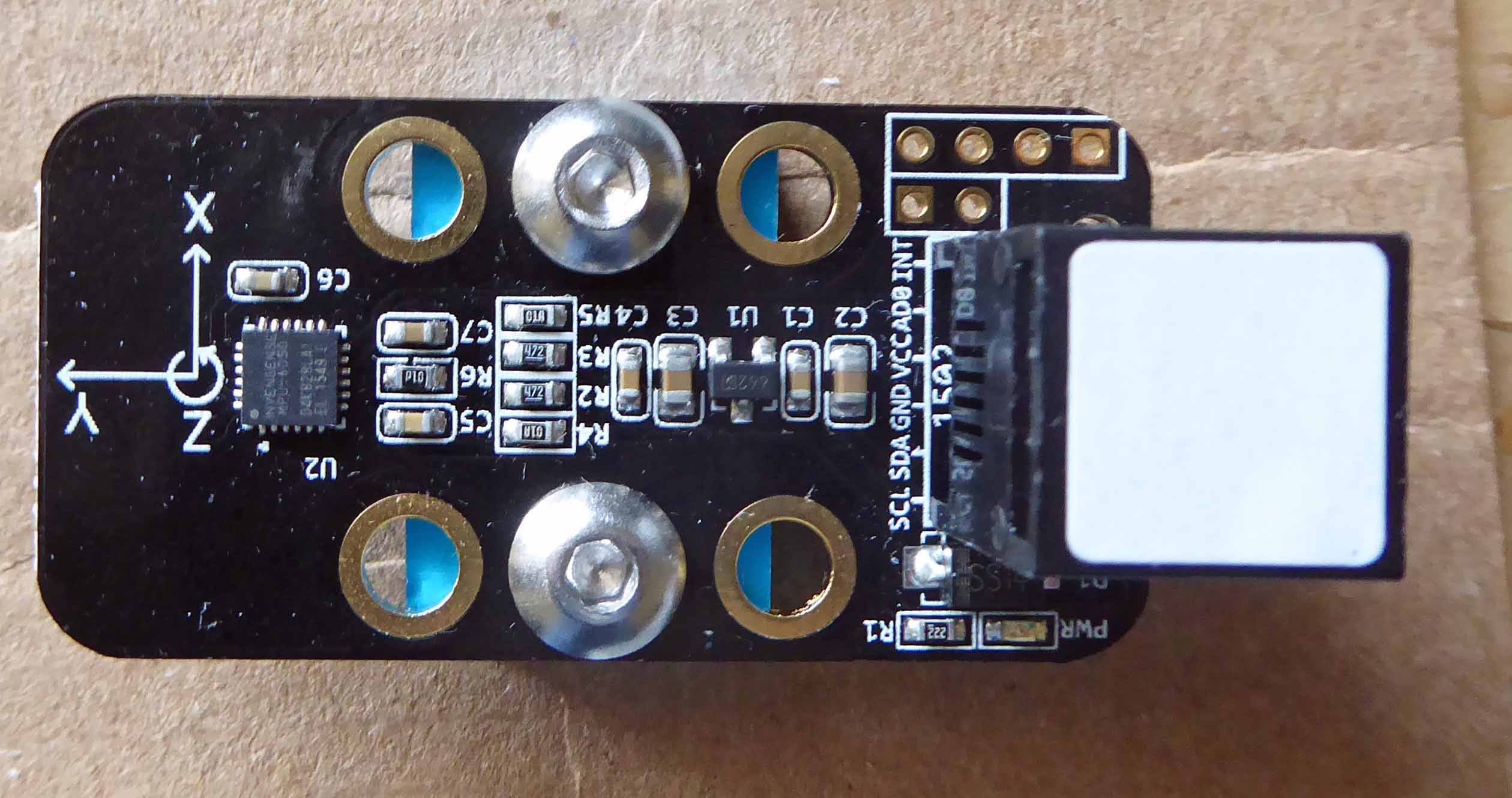
I am attempting to find a way to determine the position of the arm. I decided to use the 3-axis gyro sensor which I placed on the robotic arm.
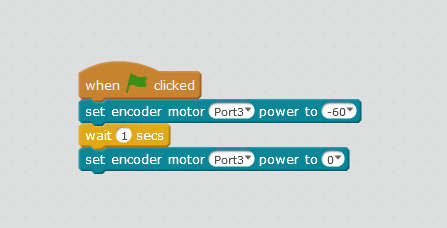
My simple block code checks the y-axis value and then raises/lowers the arm to a “horizontal” position.
It works wonderful EXCEPT the motor (port 3) never shuts off

I even added a hello at the end of the block, after 2 stop motor blocks. The hello msg is displayed but the motor keeps running. My stopMotor block includes setting RPMs=0 and power=0