I am using the compass sensor with the megapi board. I calibrated it using port 8 and the compass worked perfectly. The next day, it did not work… returned values from 155 to 158 regardless of orientation. I did not change the mblock program at all, or the position of the sensor.
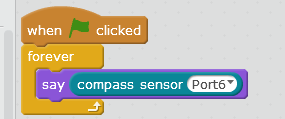
Nothing I do now will make the compass work. I turn on the megapi, connect the serial cable, and the red led is on but not the blue. If I try to read the compass from my mblock sketch, the blue led comes on but I get false, unresponsive responses. Calibrating does not help.
I have switched ports and cables, to no avail.
I wonder if the sensor is broken?