Hi all,
I’ve played around with the idea of building a new 3D printer based on Makeblock for a while and now I’m finally started! I’ll use this post as a build-log for the project.
The plan
The idea is to build a printer based on the ideas in Lulzbot’s TAZ printer. The TAZ is basically the same as a Reprap Mendel 90, but it has a vertical X-axis for the print head carriage. My plan is to use a horizontal carriage (like on Mendel 90), but since I`m building it with Makeblock, it will be fairly easy to switch this later.
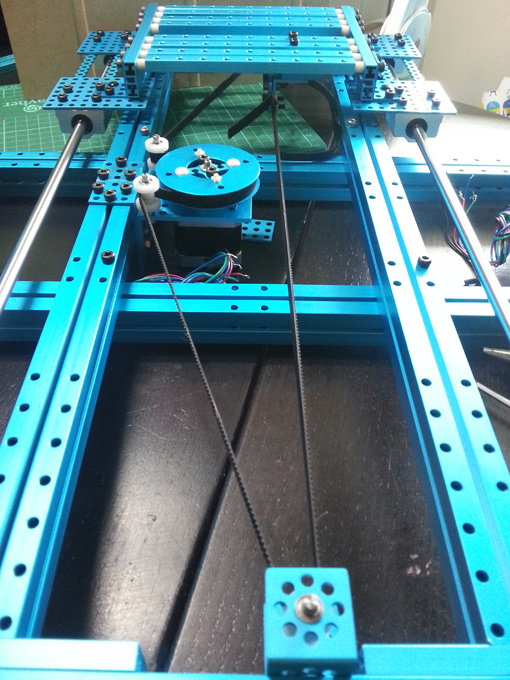
I’ll use only Makeblock parts if possible and anything that is suitable using just standard parts. This means that I’ll try to build all linear parts with the linear blocks rather than the typical LMU8 used in other printers.
I already have an Ultimaker & a Printrbot, so I’m not just building any old printer. The build volume should be huge (almost 30x30x30cm) and the hotend will be from E3D in the UK. The E3D hotend can reach the 260C required to print Nylon without melting. I can’t do that with the other two printers.
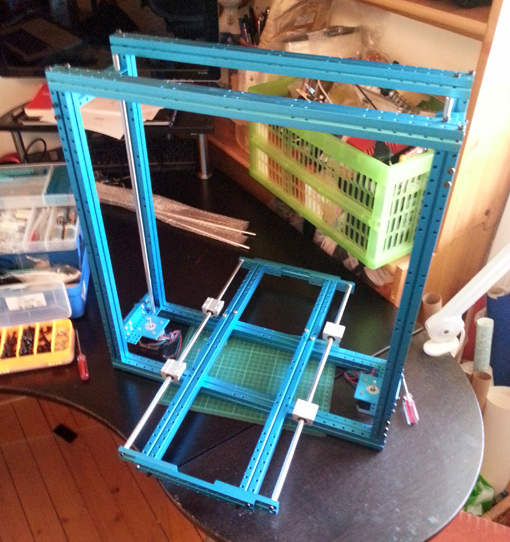
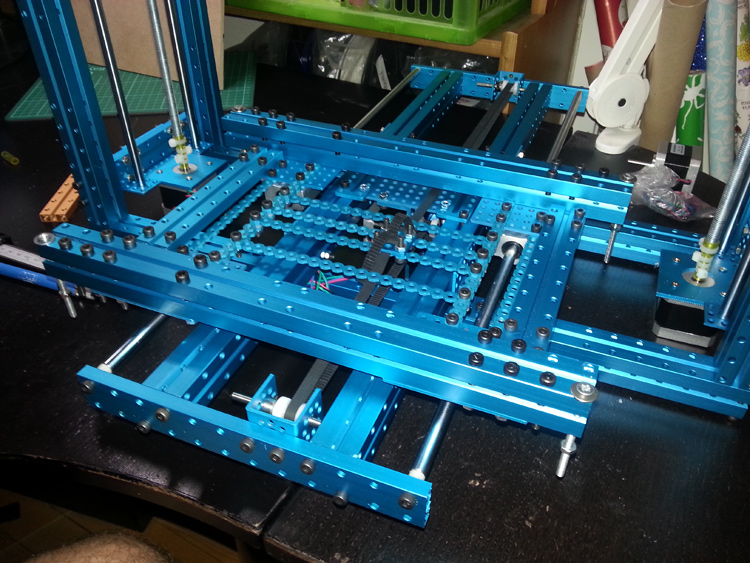
I got great help from the Makeblock crew getting hold of parts and the first thing I did was to build the main frame. It`s really quite solid! Here’s me standing on top of it in the Bitraf hackerspace lab.

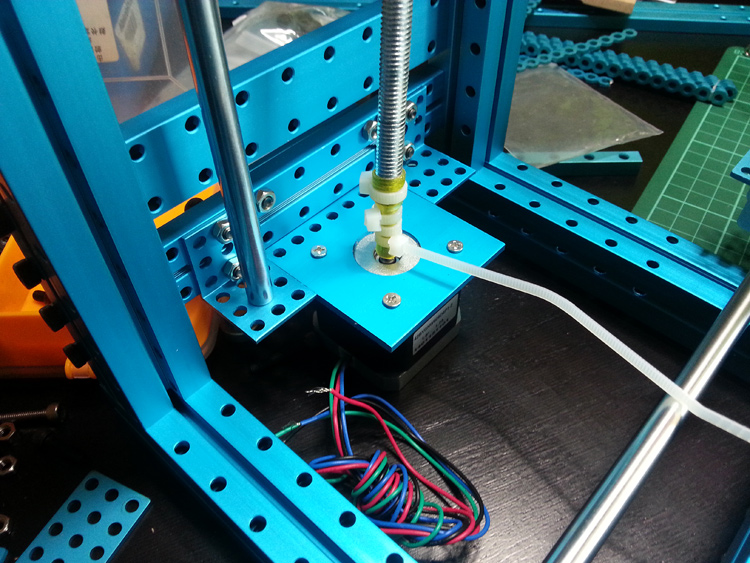
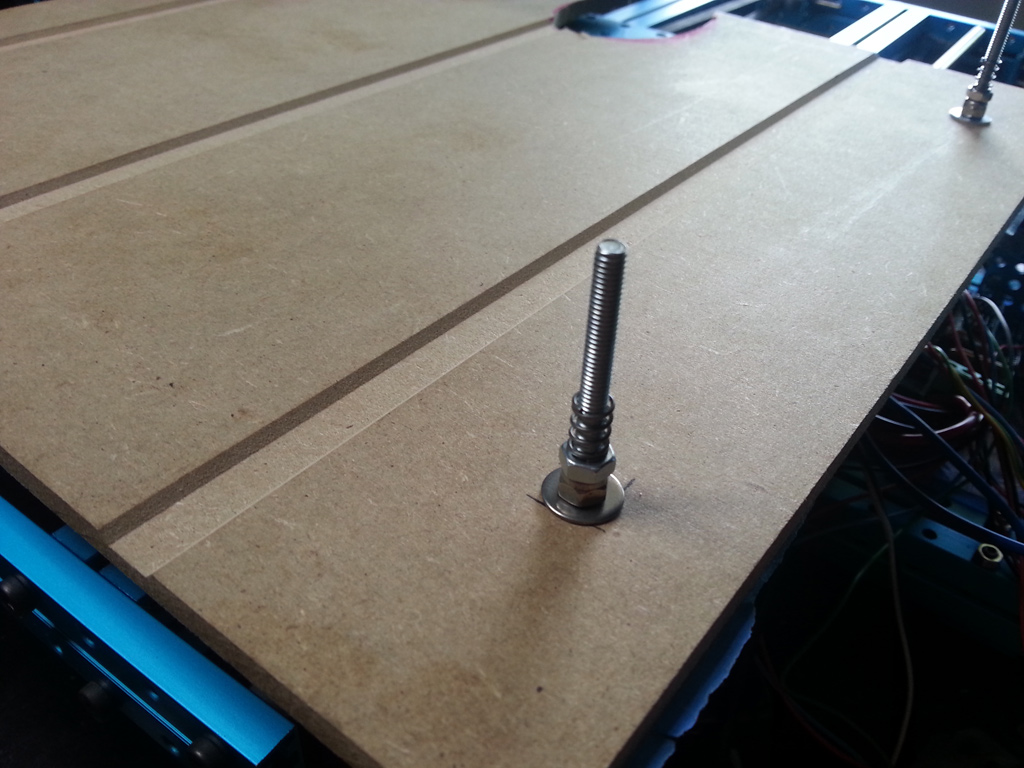
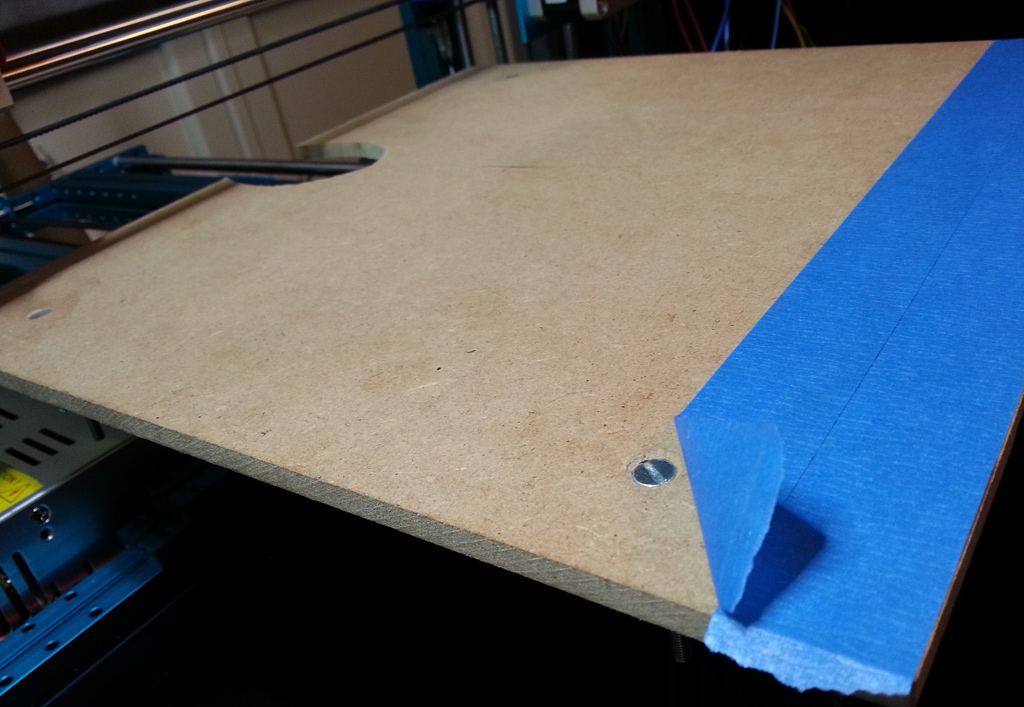
After going through the parts and testing some ideas, I solved how to fasten the Z-axis (up/down) steppers and linear rails this first evening.
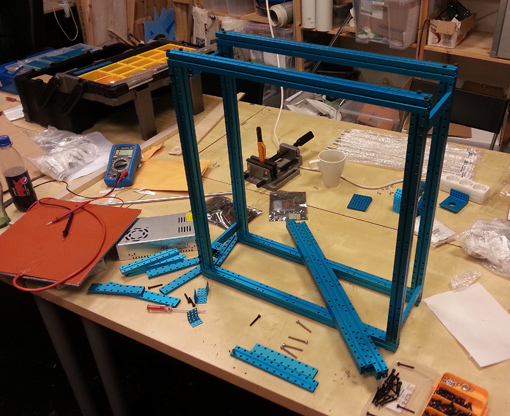
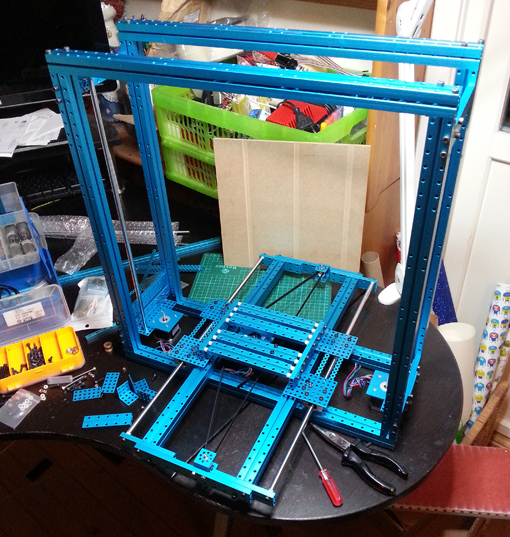
Here’s the frame before I attached the linear rails.