I have got 5 ultimate kits and every single one of them has been causing me nothing but problems.
The programs or pieces lacks consistency regarding its functionality.
I have connected the motors to the microcontroller and coded everything properly. I tried for about 40 minutes to just move the robot forward, nothing happened. When the students left, i tried the same thing and it worked smoothly.
Today we have been trying to upload programs into microcontroller. It uploaded once and then the upload did not work for 3-4 minutes. And this problem kept happening throughout the whole lesson like a loop.
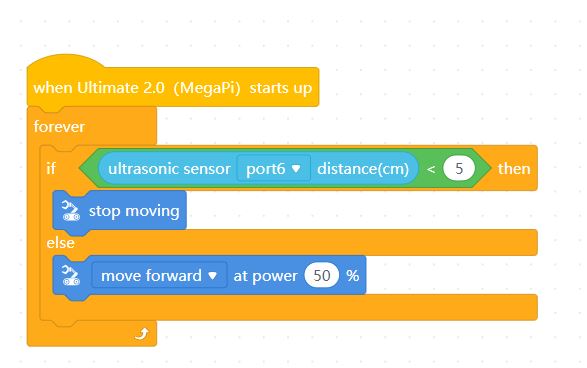
We tried to set the robot to move backwards if the distance calculated by the ultrasound sensor is smaller than 3cm. The ultrasound sensors does not recognise any obstacle if you dont press your thumb towards it.
Is there anyone else who have experienced similar tragedies with the Ultimate 2.0 kit?
If yes please bless and enlighten me with your solutions.