Hi there, first time posting so apologies if the post isn’t great.
I’m working on a self-balancing robot from the Ultimate 2.0 kit. Robot is built according to instruction, etc. But it doesn’t quite work. Even using the Firmware for it straight from the app/robot itself, without making any code ourselves, it doesn’t stay up - just violently throws itself against the box and maybe manages to stay up for a second or so before falling over.
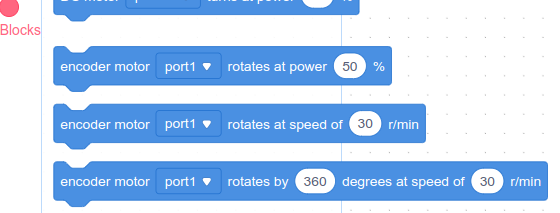
But, as it’s a part of the college project, we want to write our own code for it. However, I can’t quite get it working - I’m not sure if it’s issue with my P & I values for the controller or just general lack of Arduino knowledge (haven’t programmed in it at all prior to this, pretty much).
I’ve seen some useful tips here, especially from @CommandeR (thanks for all the help so far!) but it still isn’t working and I’m pretty sure it’s the code itself. I’ll attach the txt file - hope that works.
Merv_code_1.0.zip (1.2 KB)
Please let me know if anyone has ideas, we’ve been struggling with this guy for the last few weeks so we would appreciate any advice.
 ), and if I don’t respond by then be sure to @ mention me as
), and if I don’t respond by then be sure to @ mention me as 
 You don’t have to credit me, but if you want to, it’s perfectly fine!
You don’t have to credit me, but if you want to, it’s perfectly fine!