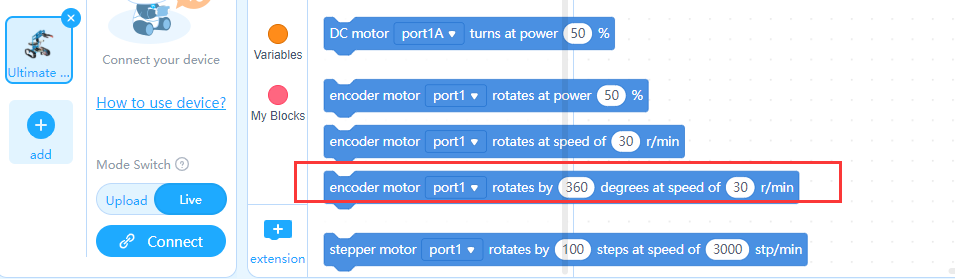
Hey I would like to track the position of my Robot. Whether by tracking the encoder Motor Data (RPM/ Wheel Diameter/Time) or by a GPS like system.
Does annyone got exprience in tracking these Date?
Any suggestion to execute in mBlock5?
Thanks in advance!