Hi - there’s a bug in the mbot2 line follow example program - I’ve posted about it in this post, however I have a separate question:
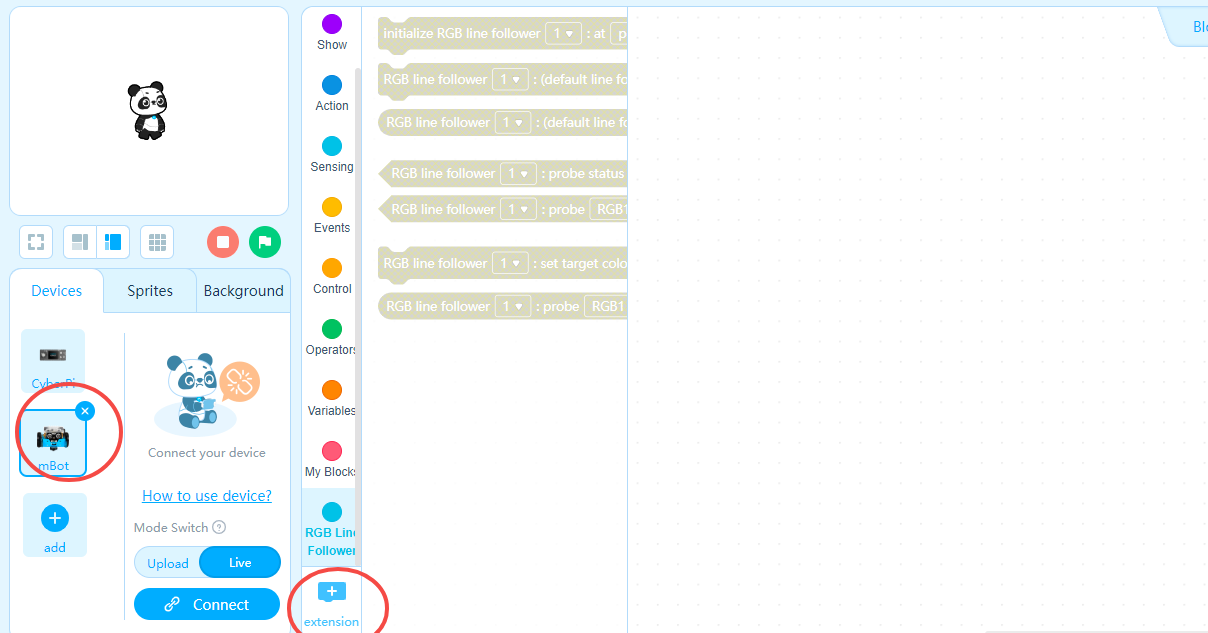
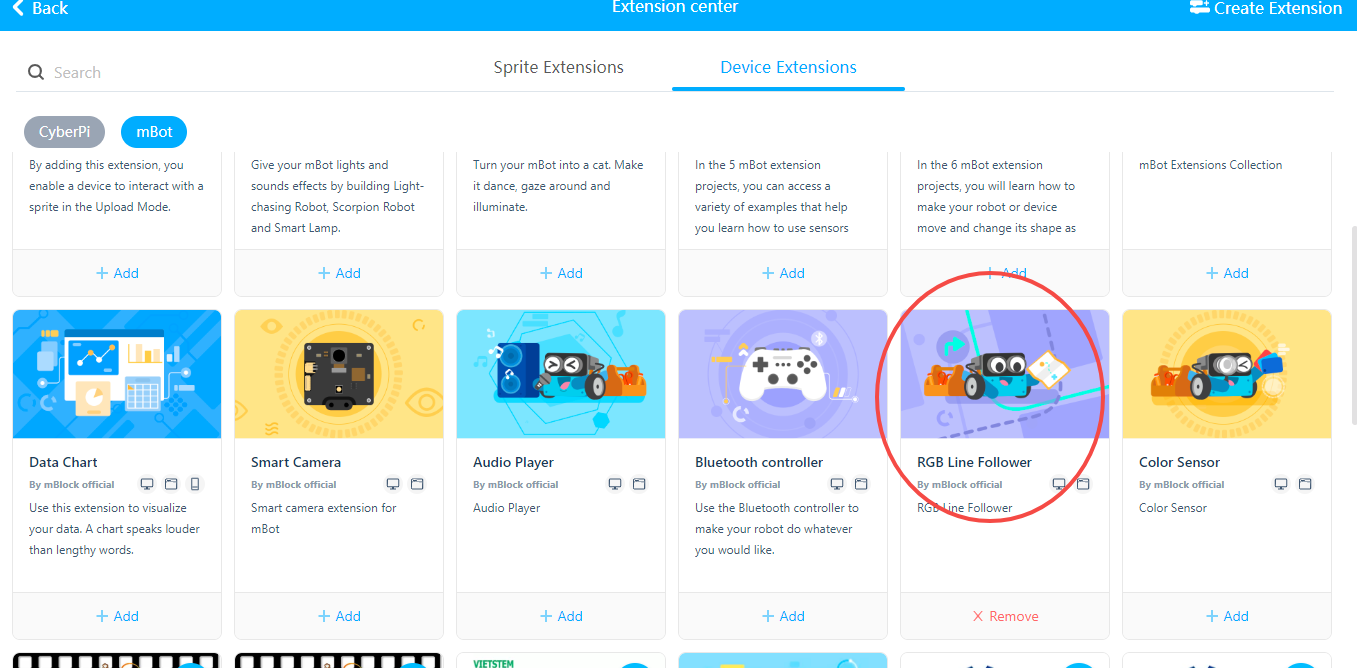
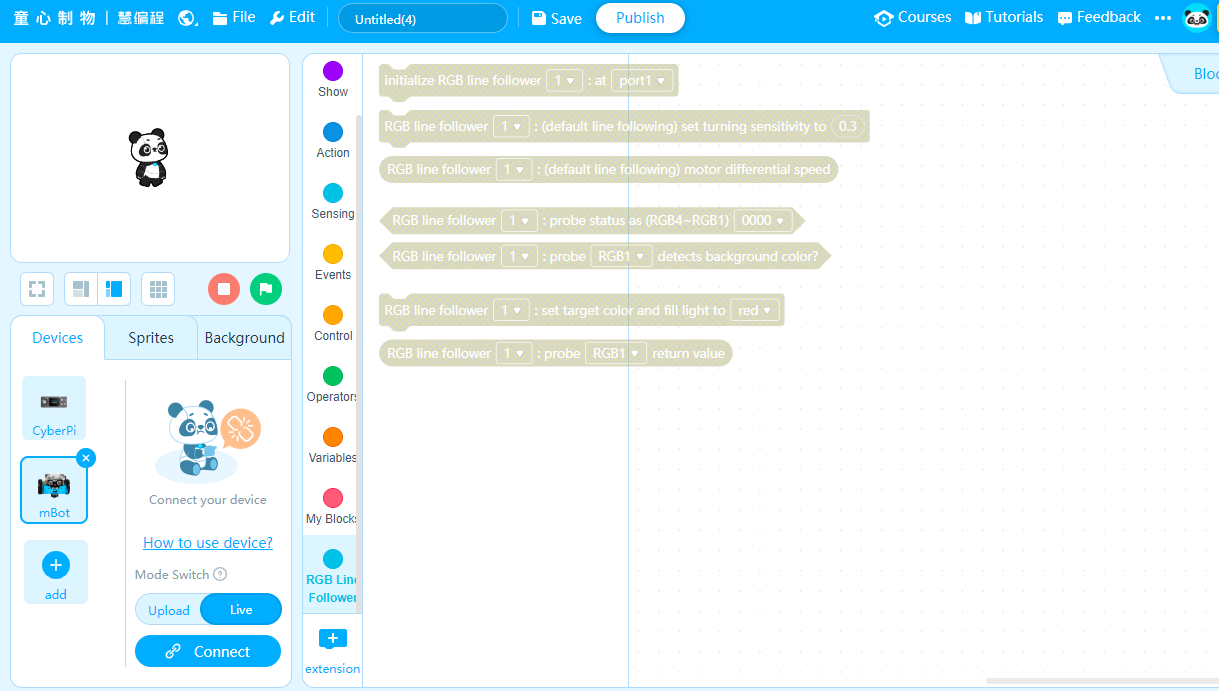
I’ve downloaded the ‘mBot2 Getting Started Activities V1.1’ pdf, and looked around elsewhere on makeblock sites, google etc - and I have found no other references as to how the ‘Kp line follow’ example app works, or where to begin to debug and fix the error (in the left power/right power section). The program itself has a note “I and D involve integral and differential knowledge, and have high requirements for mathematics, programming and hardware efficiency, which will not be expanded here”, which is pretty useless!
Has anyone here got any ideas/suggestions on how to fix the bug, or a link to a guide on how to build a correct, equivalent working app? The whole idea of the bot is learning, so a program that we cannot decipher or debug, without docs is a pretty bad starting point.
I should say, I’ve also updated the firmware to the latest version. So, alternatively - there’s a hardware issue in the Quad-RGB sensor.
Either way, I’m getting close to sending back the, and starting to fire off some honest reviews!