Hello,
I received my mBot Ranger today, and I love it. Me and the kids started playing with it right away and everything went smoothly. However, we noticed that some times, only half of the onboard LEDs would light up when activating them through the APP.
I just started testing the mBlcok development tooling, and while I was able to get a light show running at first, now only half the leds (1 through 6) seem to be working. Uploading the latetst firmware doesn’t fix this.
Am I doing something wrong here? Could this have something to do with low battery power? I put in brand new batteries.
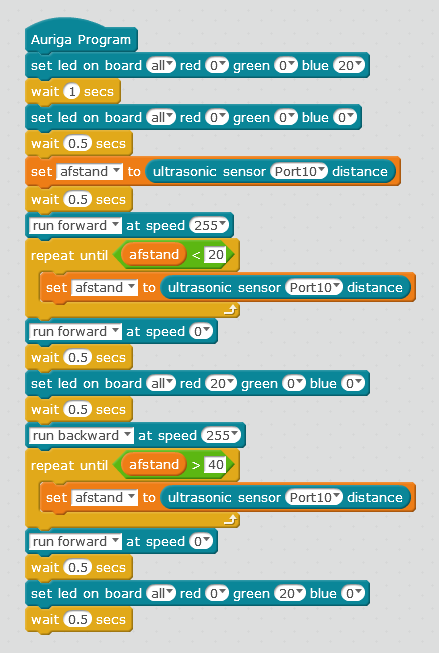
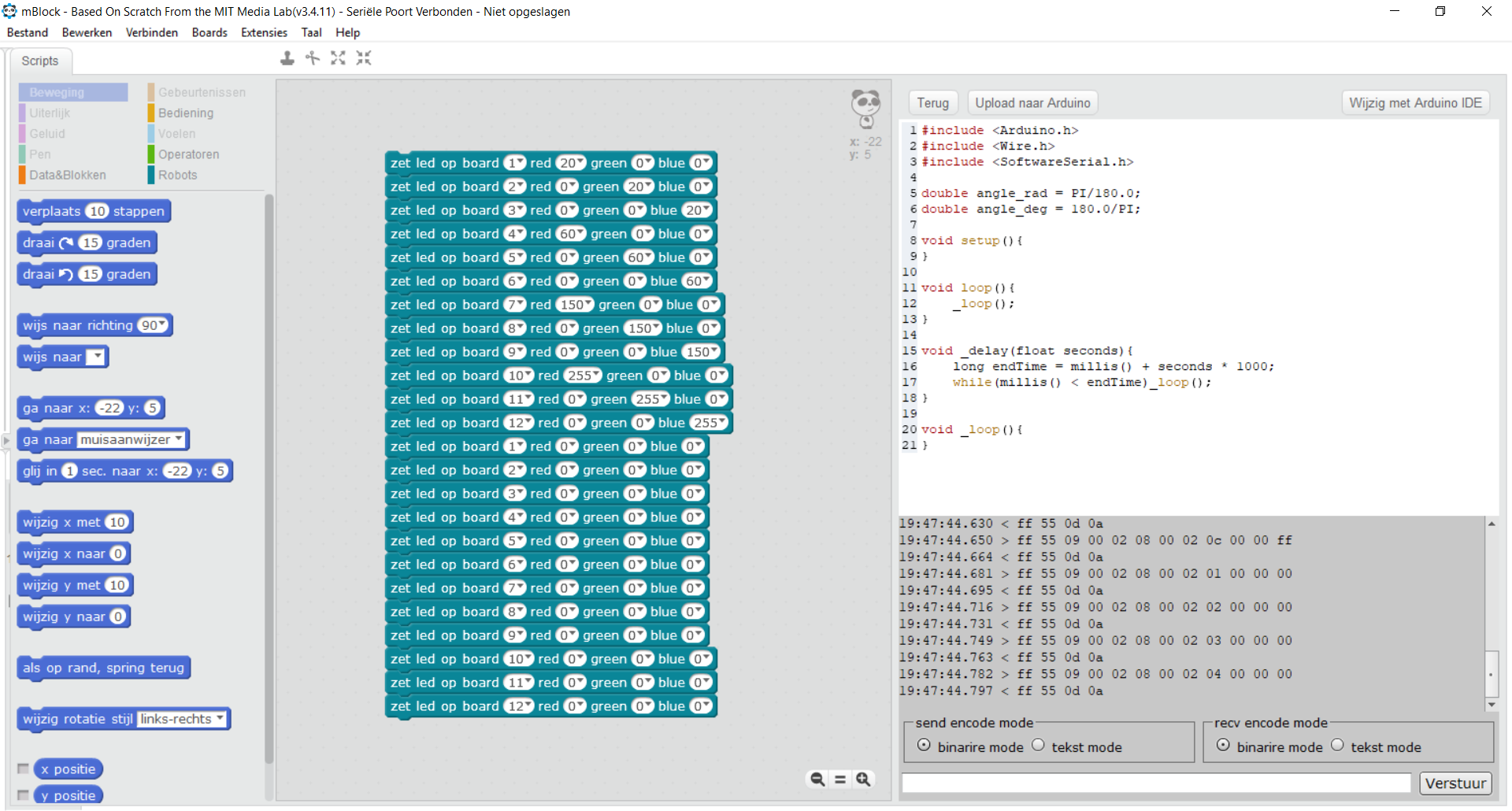
Here is a screenshot of my program:
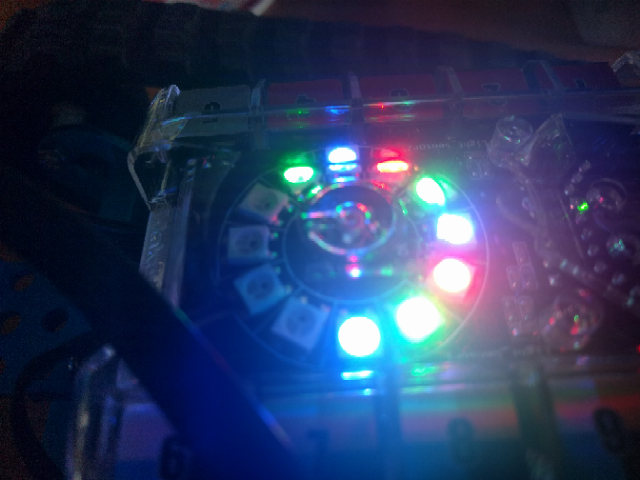
After running this several times in a row, this is what I end up with as the resulting led display:
Mark