Hi rojoamigo,
Actually, the red wires on the left or right are both okay. If you turn the motor cables over, then connect the previous side on the megaPi to the motor and connect previous side on the motor to the megapi motor interface, you can find the red wires on the left. This won’t affect the robot normal function.
For the issue that “robot goes forward/backwards correctly BUT goes right when I tell it to go left and vice versa”.
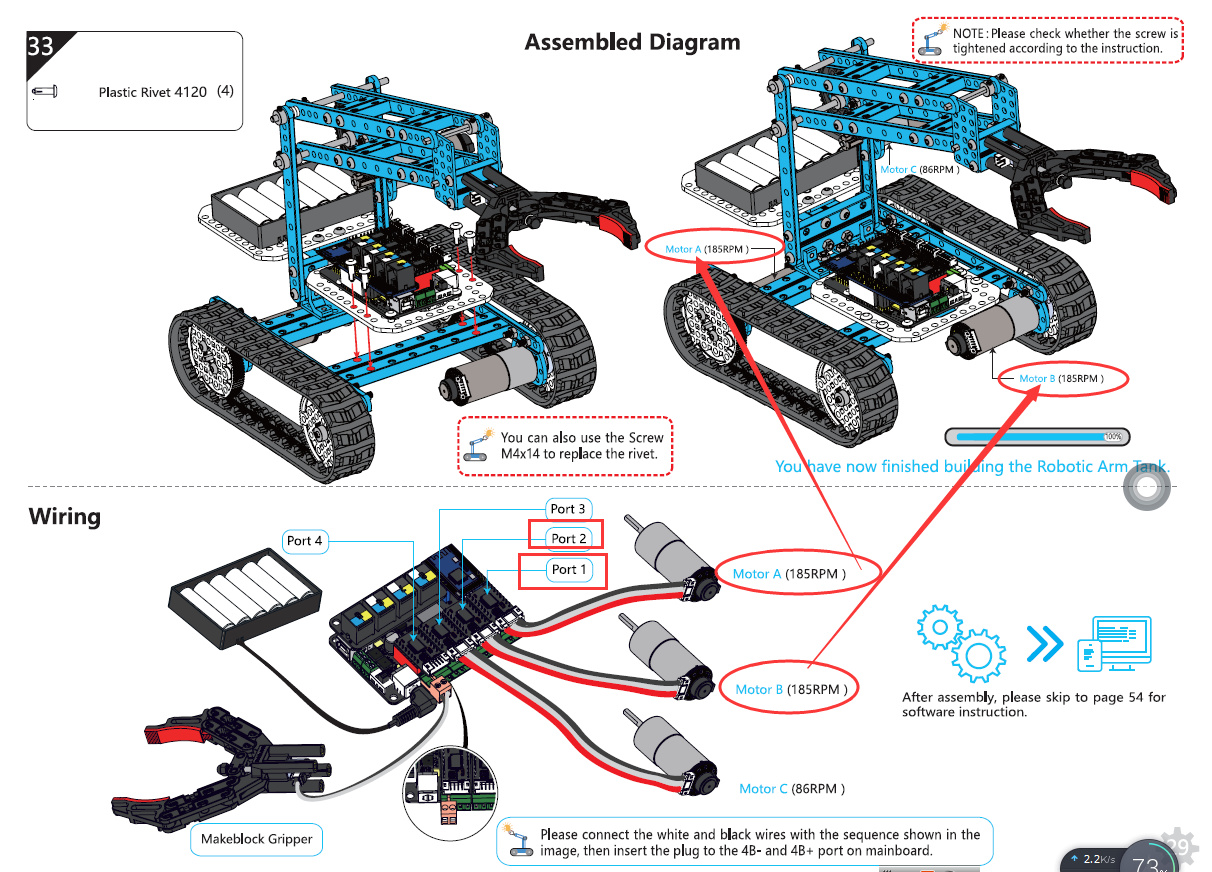
I suspect you connect the motors to the wrong port on the MegaPi, please make sure the Motor B connected to port 2 and the motor A to the Port 1 on MegaPi refer to picture below:
Besides, please also make sure you have installed the two 185RPM motors to the wheels. And the 86RPM motor to the ARM.
As for the collars, it looks like there is a little inconsistent. We will provide feedback to the product team. Thanks for your feedback!