Hi,
I am very new to Scratch/Arduino programming so please forgive me if this is very simple to do. How can I program the mBot to listen/process multiple tasks at the same time?
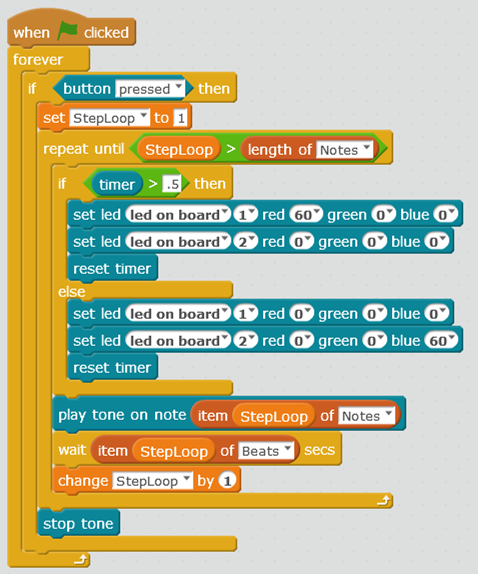
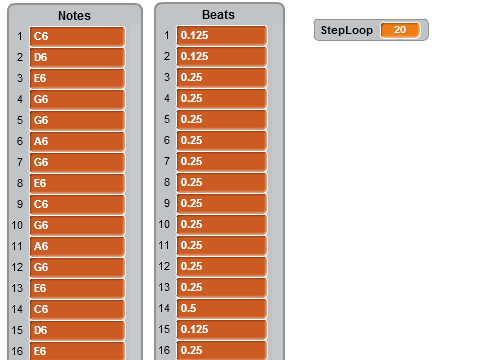
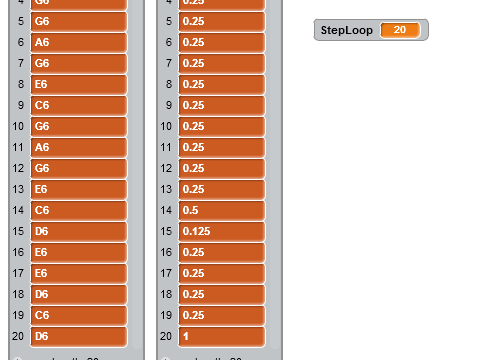
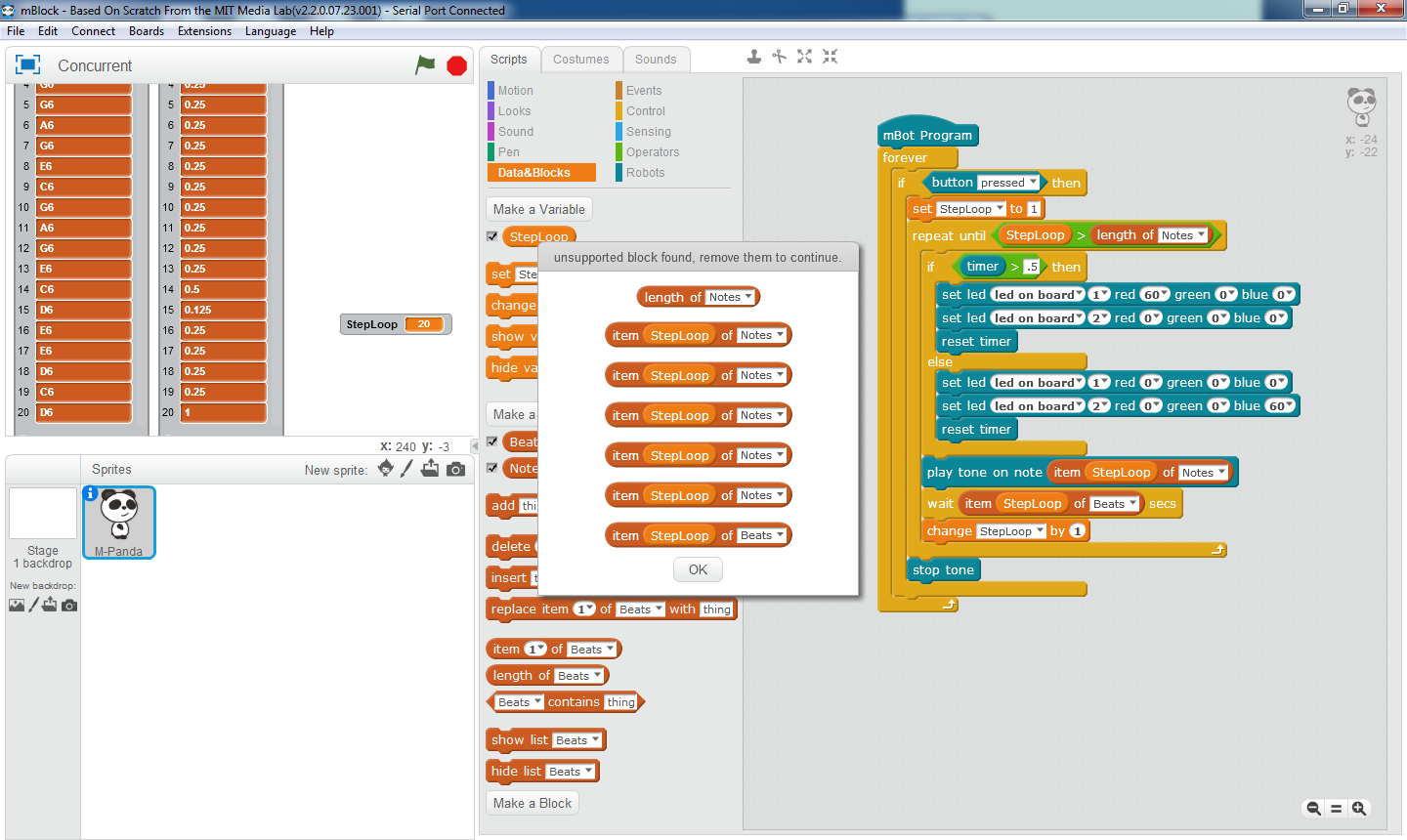
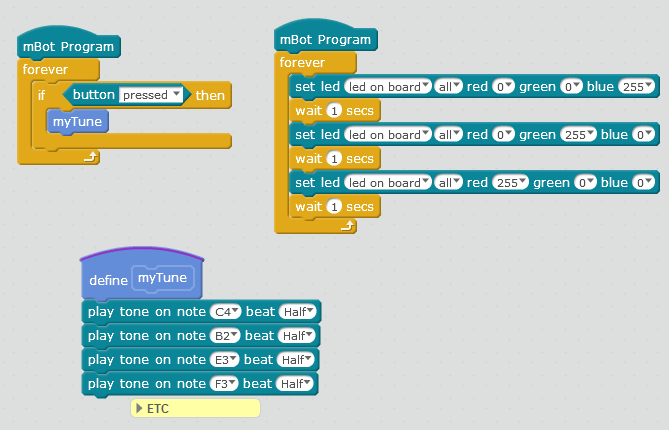
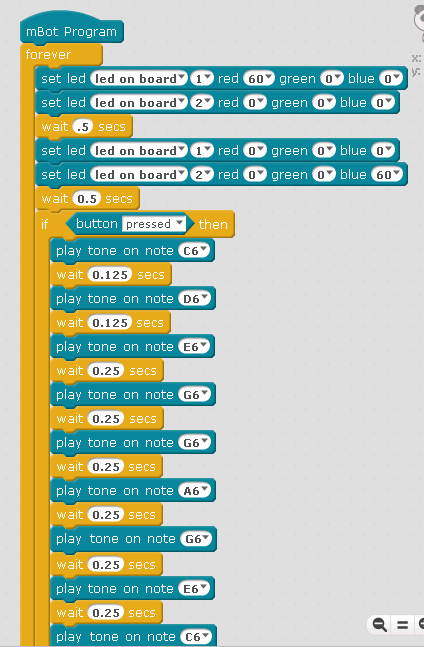
I have attached a screenshot of my code below. I am flashing the on-board LEDs and if the user push a button, it would play a song.
Two problems I am having. 1st) When the song is playing, the LEDs are no longer flashing. I would like the LEDs to continue to flash while the song is playing. 2nd) If the user pressed and released the button before #2 starts, it would not play the song. I would like the mBot to play the song once a user pushed the button and not have to wait until after the 2nd LED to flash.
I am trying to put together some training lessons for a group of kids (ages 6-9). Starting with LEDs and then move on to the sound, input from button, etc… If you have some codes that you can share with me, please let me know.
Thank you!
Hin