The 7 secs of video you email me doesn’t show me anything except a number coming up on the a screen. I can’t see the code that generated the number on the screen or see a motor turn or see how the motor is connected. It doesn’t tell me anything.
The link you posted me for the enhanced encoder motor is the 180-smart-encoder-motor which is a serial controlled motor the same as the smart servo and won’t plug into the motor ports of the Augira but rather the serial servo port.
see cut from the page in your link
This is where a serial protocol motor will be plugged into.
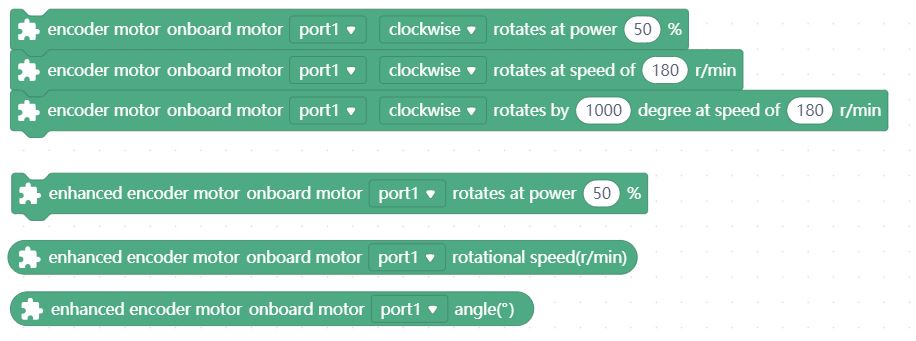
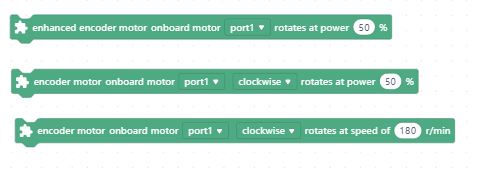
Now repeating from above the simple task that I want to be able to do with standard mblock is : set the motors at a regulated speed (RPM) then be able top read the encoder positions. Can you please post the needed blocks to achieve this.