Dear all,
Recently, we received some comments about Makeblock products on the forum. We are very sorry for all the trouble and confusion. All of which have been forwarded to our technical support team for verification already. Hope we could find out the root cause ASAP.
Meanwhile, in order to exclude those issues not really related to product, we need your kind support to check followings and try the solution we provided
- Please check if the cable connection is correct. You could get the instruction from the User Guide or you could download the PDF file from http://learn.makeblock.cc/ .
- Please check if the battery is power enough to support the Bluetooth working stably.
- Please check if you have uploaded the latest firmware to the robot before you control the Starter kit or Ultimate kit by our App, or try Bluetooth function in mBlock/Scratchbot, https://github.com/Makeblock-official/Makeblock-Firmware. For detailed process, please refer to http://learn.makeblock.cc/learning-arduino/
After check above , if you still find
- The motors don’t work in normal. Please email to us via support@makeblock.cc, tell us the problem of your motors with photo or video, we will feed back in 24 hours.
- Bluetooth disconnection for the App. Please check whether you have update the latest firmware.
- Scratchbot/mBlock doesn’t work. Please re-install your Scratchbot / mBlock with our last version
Thanks and best regards.
Makeblock Team
About Motors Qustions
Thank you for choosing Makeblock product and I’m very sorry for the problem you met. Please kindly confirm below details with us to eliminate some FAQ and figure out what we can do for you, thanks.
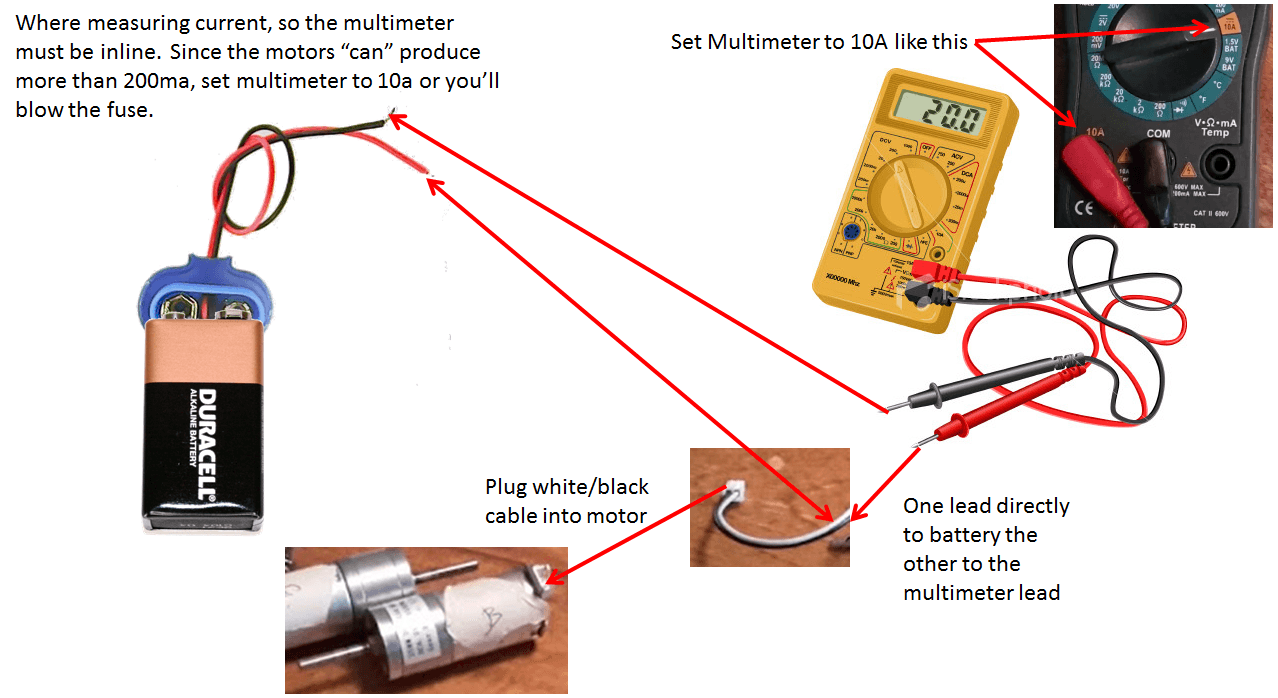
1. Please confirm whether the motor is unable to turn right/left, or unable to run. Please also confirm if both motor is defective or just one.
2. Please rotate the wheels of your motor by hand, check whether it’s too tight or not.
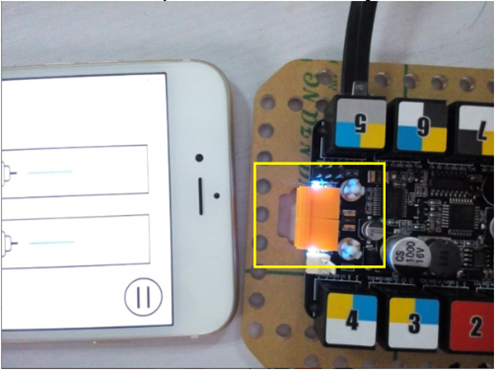
3. Please use IR remote controller or Bluetooth app to control the robot car, and observe the motor signal LED. If the LED light didn’t turn on, which indicates that there is no firmware. Please upload firmware with Arduino or mBlock. (Battery should be installed or the light won’t turned on) Please download firmware at https://github.com/Makeblock-official/Makeblock-Firmware/tree/master/mblock_firmware.
4.If the LED light is on when you control the robot car, please check the battery and wiring. Please try 6 brand new batteries or try an 11 volt lithium battery if you had one, sometimes the motor do not work is because the voltage is not enough to work.
5.Please check the wiring of motors. Unscrew the littler screws on orange motor plug, insert the motor wires (be sure to connect to the core instead of the plastic cover), and then screw tightly.
About Upgrade Firmware Qustions
Please refer to following steps to upload firmware.
- Turn on your robot car.
- Open the Bluetooth switch of your smart device (Android phone/iPhone or iPad)
- Open “Makeblock” APP, make sure you installed the latest version.
- Find your robot sample in app, click the “play” button, find the Bluetooth device named “Makeblock”, select to connect.
- The “Update firmware” window will pop out, click “Update”, and the window will remind you to press reset button on mainboard.
- After pressing reset button, the window will show a progress bar, and it will be disappeared once finished.
- Buzzer will beeping after finish uploading, please turn it off by hand. The switch is a tiny button next to the reset button
- Please turn off your robot, your Bluetooth, exit your app, and then re-connect robot to your smart device as step 4. You should be able to control the robot via Bluetooth now.
If you failed update firmware via phone, please update the firmware by your computer via USB cable.
Here you go the steps to update firmware in Arduino.
- Please un-plug the Bluetooth module.
- Please connect your mainboard to computer via USB cable.
- Install the driver of mainboard. Attached please find the driver for Windows, if you are using a Mac OS computer, please check the backside of your mainboard and download corresponding driver at http://app.makeblock.cc/program/.
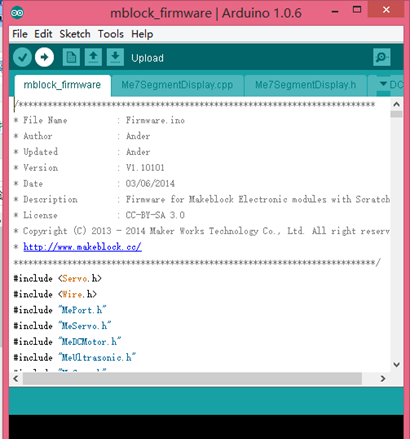
- Please download the latest firmware at https://github.com/Makeblock-official/Makeblock-Firmware/tree/master/mblock_firmware, and extract it to your computer.
- Open Arduino.exe, click File->Open, and then select the firmware file mblock_firmware.ino. Select the correct board type (UNO for Me Orion, and Leonardo for Me Baseboard) and serial port in menu “Tool”.
- Click “upload” button, progress bar will appear at the bottom of Arduino.exe and the signal light will blink. Please kindly wait for a few second at this progress.
- Buzzer will beeping after finish uploading, please turn it off by hand. The switch is a tiny button next to the reset button.

After finished, please remove the connection, plug the Bluetooth module, and then connect to the robot via Bluetooth to check if your problem fixed, thanks.
About Bluetooth Qustions
Here you go the flow of Bluetooth connection.
1 Please check your wiring, be sure everything is correct.
2 Install 6 AA batteries for your robot, and turn it on. You should be able to find red light spot in both Bluetooth module and ultrasonic sensor module. (Be sure that your batteries are power enough, or the Bluetooth connection would be tough and unstable)
3 Turn on the Bluetooth in your smart device, open Makeblock app. (Download Makeblock Bluetooth control app at http://app.makeblock.cc/)
4 View the menu and select your robot sample picture.
5 Click “play” button or menu button (put your smart device close to the robot car), search for device.(The UI is a little bit different for Android, iPhone and iPad, please have a try, you can find “help” in the homepage menu)
6 You should be able to find “Makeblock” Bluetooth device, click to connect.
7 Touch the direction key to control your robot.
8 Explore the function of every key.
Please contact support@makeblock.cc for any question.