I’m wondering if (and how) it’s possible to use a non-makeblock sensor on an Auriga. I’d like to wire it to a RJ25 plug but the TF-mini is a four wire, not six, connection.
Has anyone used non-makeblock sensors? If so, could you give either general (in other words, for most any sensor) or specific details about how to go about it?
Using TF-mini on Auriga
BigAl
#1
OutoftheBOTS
#2
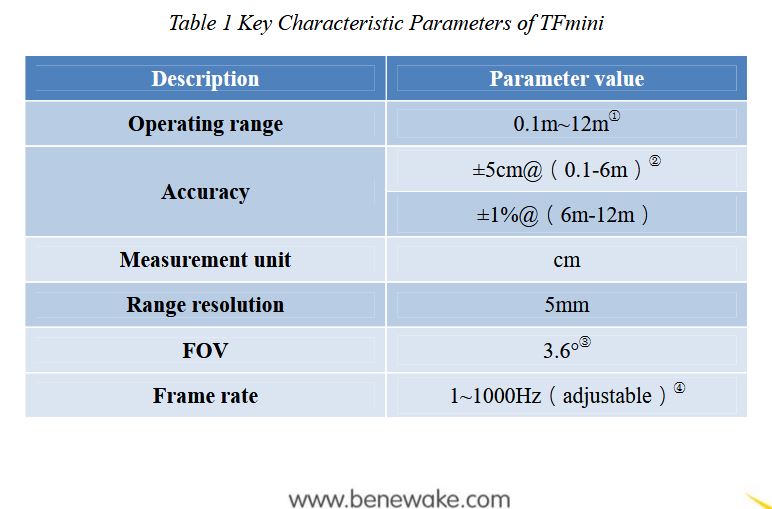
There is a number of TF-mini that are TOF sensors. I haven’t used 1 myself but have used the VL53L0X TOF sensor a lot on a number of projects.
Please link the exact TF-mini you want to use and I will see if I can help u.
The TF-mini seems to use UART serial for communication. On the Auriga port 5 is the UART serial port and will be able to communcate to it.
The docs that I have read seem to indicate it is also 5v same as Auriga.
You can use the RJ25 adapter to connect the TF-mini to port or you can make your own adaptor like I did in this video https://www.youtube.com/watch?v=8jyj71Xyh0g
There will be lots of Ardunio code around use this sensor so you can either program the Auriga in Ardunio or use the tool to wrap up the ardunio code into a mblock block
BigAl
#3
It’s a Benewake tf02 and uses UART and i2c. I’ve seen some mention on Arduino forums that it’s non-standard and many Arduino libraries won’t work and I’m looking more into that. I’m using a MeUltrasonic but I wanted to also use a different sensor type to check distances. I’m using both a tilt/ pan (ultrasonic) for distance and edge detection and a pan (hopefully the tf) for just distance. I’m going to check out your video tonight and give it a go tomorrow.
OutoftheBOTS
#4
Just a quick look at that model it more seems to be for larger distances than smaller distances like the US sensor.
What are the distances you want to detect over??
BigAl
#6
And it turns out there is an Arduino library just for it: https://github.com/budryerson/TFMini-Plus. Blow me down.
BigAl
#7
I should mention I’m using port 5 for the lcd. My experience is that using the lcd on 6-10 results in very twitchy servos.
OutoftheBOTS
#8
What distances are trying to measure??? as different hardware has different inaccuracies for different distances.
BigAl
#9
I’d probably use this is the short distance mode. This initial build I’m doing is simple obstacle avoidance. Success will be measured by navigating through rooms. I’m using the Auriga for wiring simplicity and the fact that I have two and a mess of MB sensors and motors. Plus the Auriga integrates encoder drivers, a gyro and WiFi.
Next will be the Rover5 platform with a Nano/mega and RP1
system
#10
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.