Hi guys,
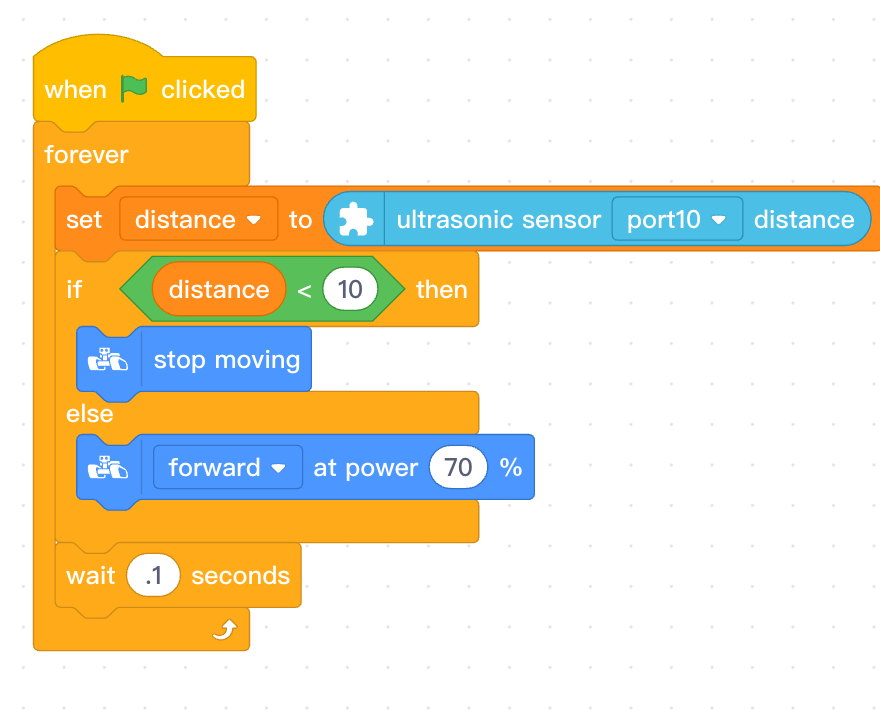
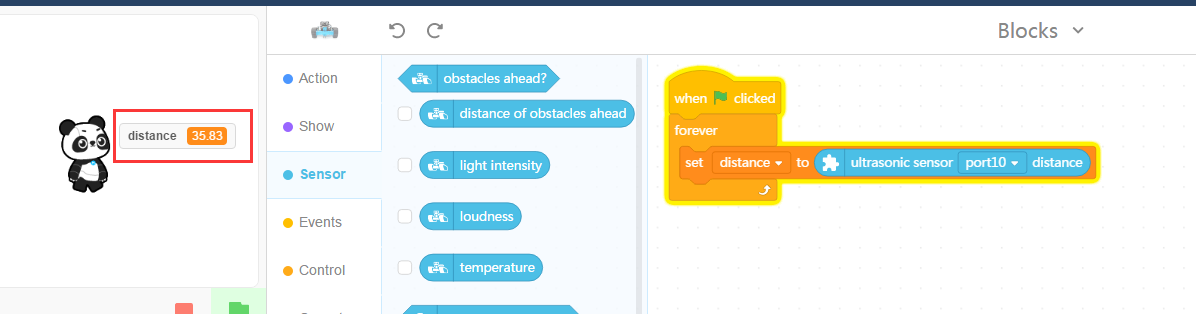
I created a simple program using the say command returning ultrasensor reading, and Im always getting a random values lower that 1. For example 0.358, the next time I could get 0.865, so on and so forth.
I read that the measures should be between 3 and 400, so how can I get that low value and random?
Thanks in advance
Regards