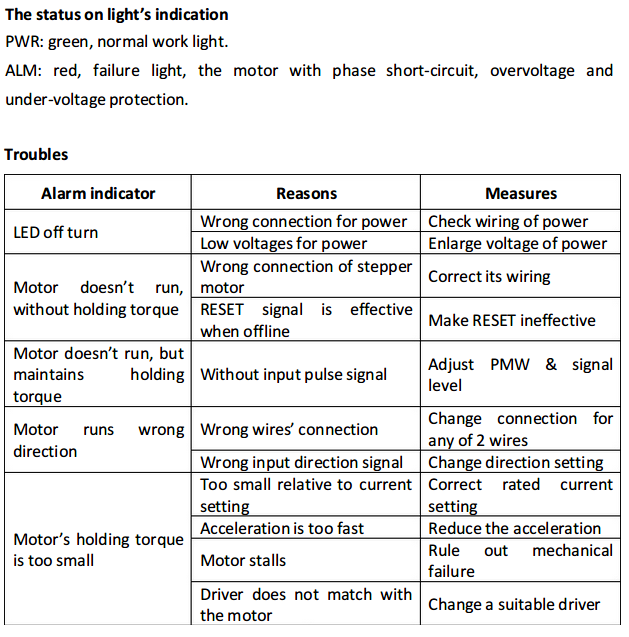
I am confused about the DIP switch settings for the XY Plotter 2.02. They are On On Off, which from the data sheet means the microstepping rate is 16x , ASSUMING the little stepper controller is the same as the large controller to which the datasheet refers, and switches 1 - 3 equate to switches 5 - 7.
When I try to work out the microstepping based on the figure of 174,9781 ppm given in the Setting.ini file used by GRemote, this is what I get, a suggestion that the rate is 32x, double what the document says it should be.
18-tooth pulley
Belt pitch 2.032 mm (from spec, confirmed by vernier caliper along 18 teeth )
distance moved in 1 revolution = 36.576 mm ( 18 * 2.032)
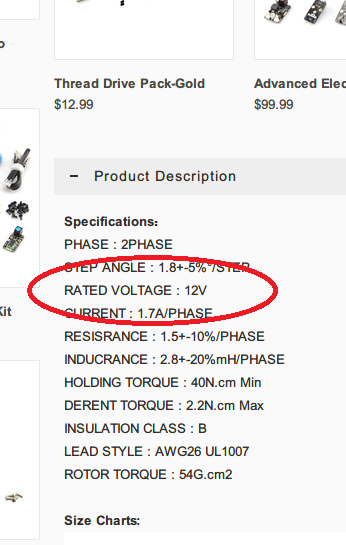
Stepper motor 1.8 degrees = 200 steps per revolution
single step = 0.18288 mm ( 36.576 / 200)
1mm = 5.468066 steps at 1x stepping rate ( 1 / 0.18288 )
Setting.ini X pulses per mm = 174.9781
Apparent stepping rate = 32 ( 174.9781 / 5.468066 = 31.9999 )
Switch settings of on on off are for 16x, pulses/rev = 3200
distance per pulse = 36.576 / 3200 = 0.01143
pulses per mm = 1 / 0.01143 = 87.48906
The setting,ini value 174.9781 / 87.48906 = 2
So everything seems to be telling me that the switch settings shown in the photos for the XYPlotter 2 assembly are for 32x, unless I am misunderstanding something here.
 just my 2 cents
just my 2 cents