Hi @abasel -
I was interested in your comment, so tried and was able to replicate your observations … quite strange. I’d also be interested in hearing what the Makeblock folks have to say about this.
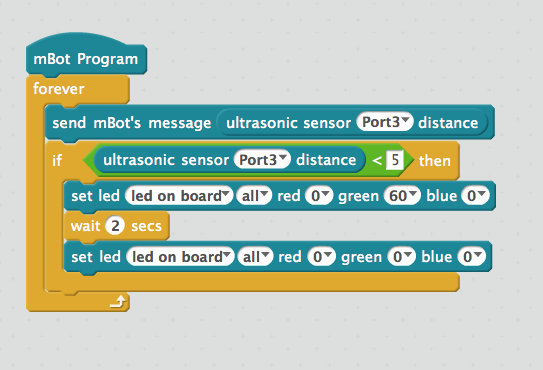
In an attempt to try to display the actual ultrasonic reading in the mBot program mode I was playing around and inserted a ‘send mBot message’ statement at the beginning of the program … here’s the screenshot …
 .
.
(To be honest, I actually have no idea yet of what the send message statement does … I was just fooling around).
Curiously, running this modified program, the program seems to work as intended again … reliably discriminating objects at about the 5cm threshold.
Anyway, again, I have no idea why this works, or what ‘send message’ does … it was just an interesting accidental find that I thought I’d pass along. Will await Makeblock’s take on what might be happening here.
 .
.
