I am trying to set two servomotors at pin 9 and 10 of Arduino Pro at the same time. Unfortunately, only the
second command is working from the graphical programming code. On the other side, corresponding arduino
code is OK and also after upload it works as assumed. Any idea how to make it work also from graphical language?
Version windows 3.0.
Board: arduino Pro 328P
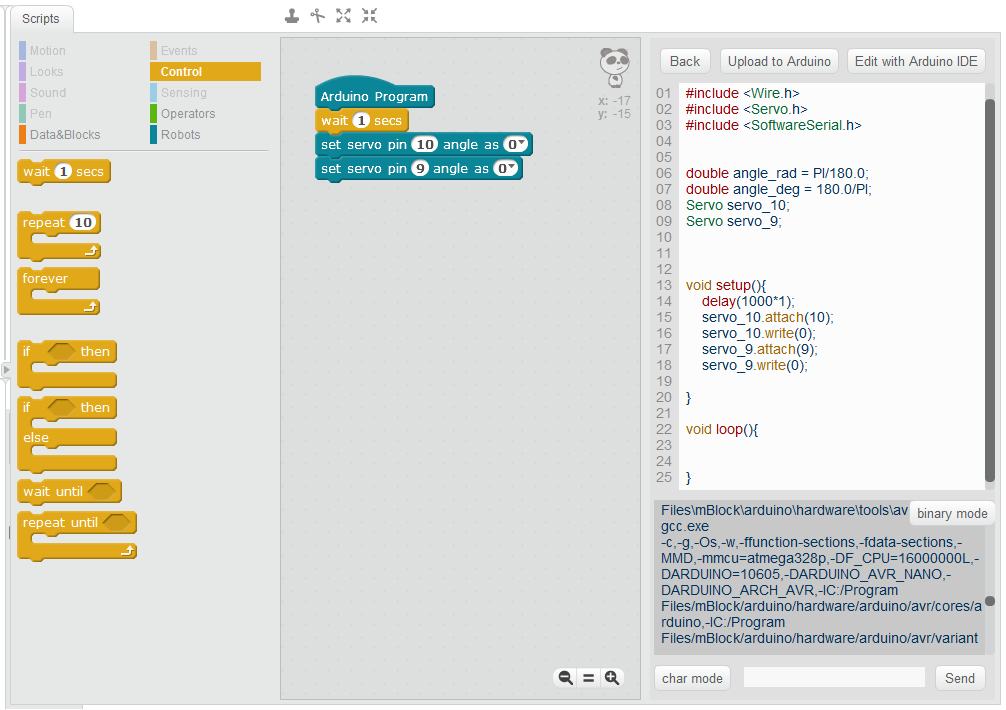
Corresponding program
#include <Arduino.h>
#include <Wire.h>
#include <Servo.h>
#include <SoftwareSerial.h>
double angle_rad = PI/180.0;
double angle_deg = 180.0/PI;
Servo servo_10;
Servo servo_9;
void setup(){
delay(1000*1);
servo_10.attach(10);
servo_10.write(0);
servo_9.attach(9);
servo_9.write(0);
}
void loop(){
}