For the CoderDojo (7-12y kids), I’m making a robot arena where two robots will fight.
- They both have a balloon and a sharp stinger.
- The robots cannot leave the arena (marked by black tape) and get a power-up (faster speed) when in bright light.
- Every minute the players (humans) can move a object to block their opponent. If there’s an object in the arena, the will avoid it.
- First ballon blown looses the game.
Problem is that I can’t get the basics right: controlling the speed of the robot.
For some reason the robot just keeps on running, even if I set the speed to zero.
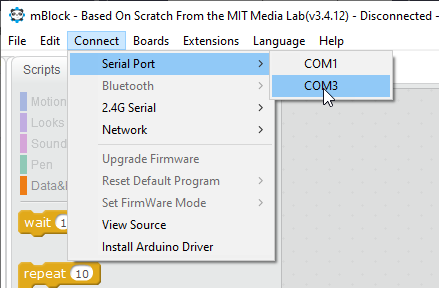
You can find my script attached. I stripped it to the bare essentials for debugging.
Any help is appreciated…