Hi,
is there some proper documentation / coding examples available for the on-board Encoder on the Auriga?
I’m doing some more advanced programming for my mBot Ranger in Arduino IDE / Eclipse, which isn’t easily possible using Scratch.
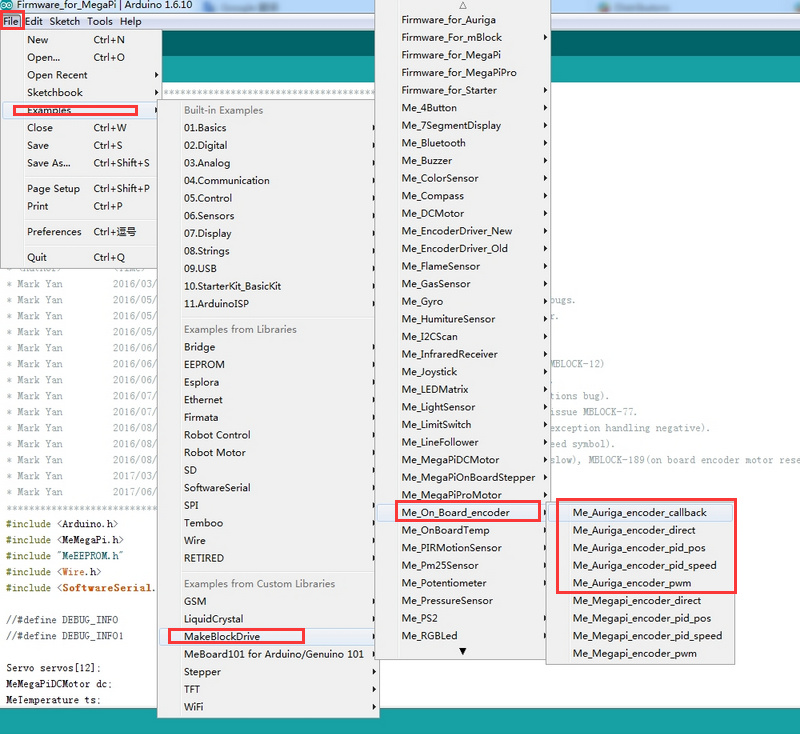
Fortunately I was able to get the mBot Ranger moving by copying Encoder/Motor related stuff over from the default Auriga Firmware by trial and error approach. But I would really like to understand what I’m doing there and which purpose the various initialization steps for the Encoder serve. 
For other modules and components it’s not too difficult figuring out how to properly configure and use them, by having a close look at the Auriga Firmware. But for the Encoder this is quite difficult.
The comments in the header file and the information at
http://wiki.makeblock.cc/library/docs/hierarchy.html
http://www.mblock.cc/faq/
unfortunately don’t really help as they are too high level and incomplete for the Encoder.
Thanks.