Hi,
Here is my great automatic snow removal. The only problem is that it does not work properly.
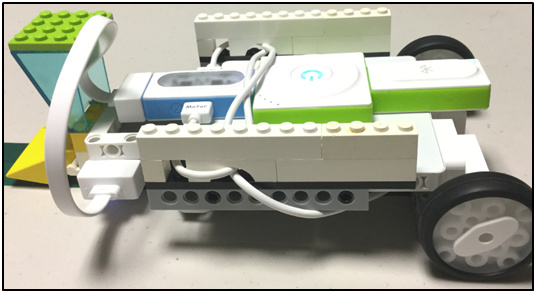
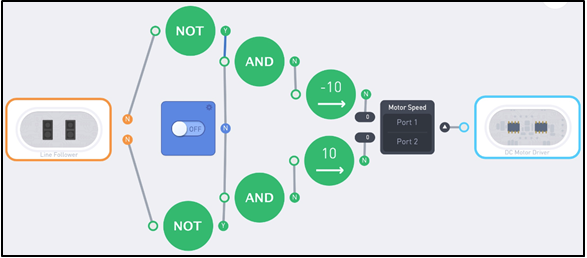
I placed a Block Line Follower to follow my line like my mBot BUT I must misunderstand the block.
I tried several line colors
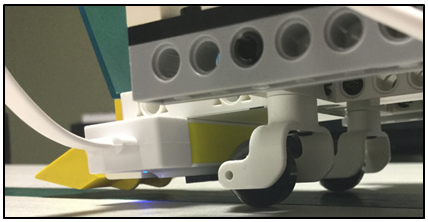
I try to approach and remove the Line Follower sensor from the ground
I try to reverse my condition (NOT)
Result: Not very regular
First question: What value does the Line Follower block return on a black line?
Second question: What is the problem (it is rather general as a question;)