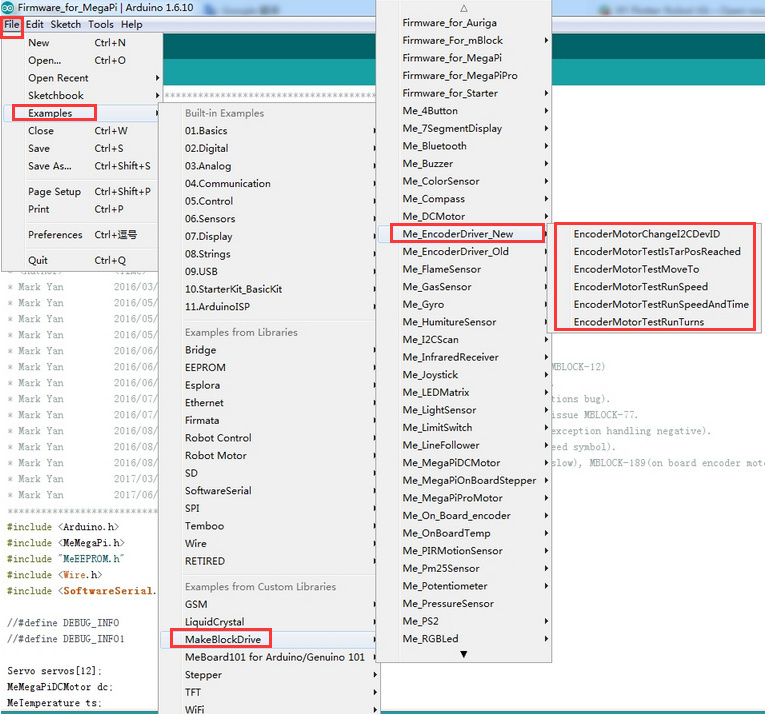
Hi there! In order to program the Encoder Motor Drivers I am using the class MeEncoderNew, just like it is done in the sample programs. When I looked through the different functions that are declared in this class there is one thing i really dont get:
Some functions are using the input argument “float lock_state”. What exactly is lock_state doing or in other words, what do I control if i change lock_state? I tried different values but couldn’t figure out myself what exactly is happening.
Maybe you can help me out. Thank you!