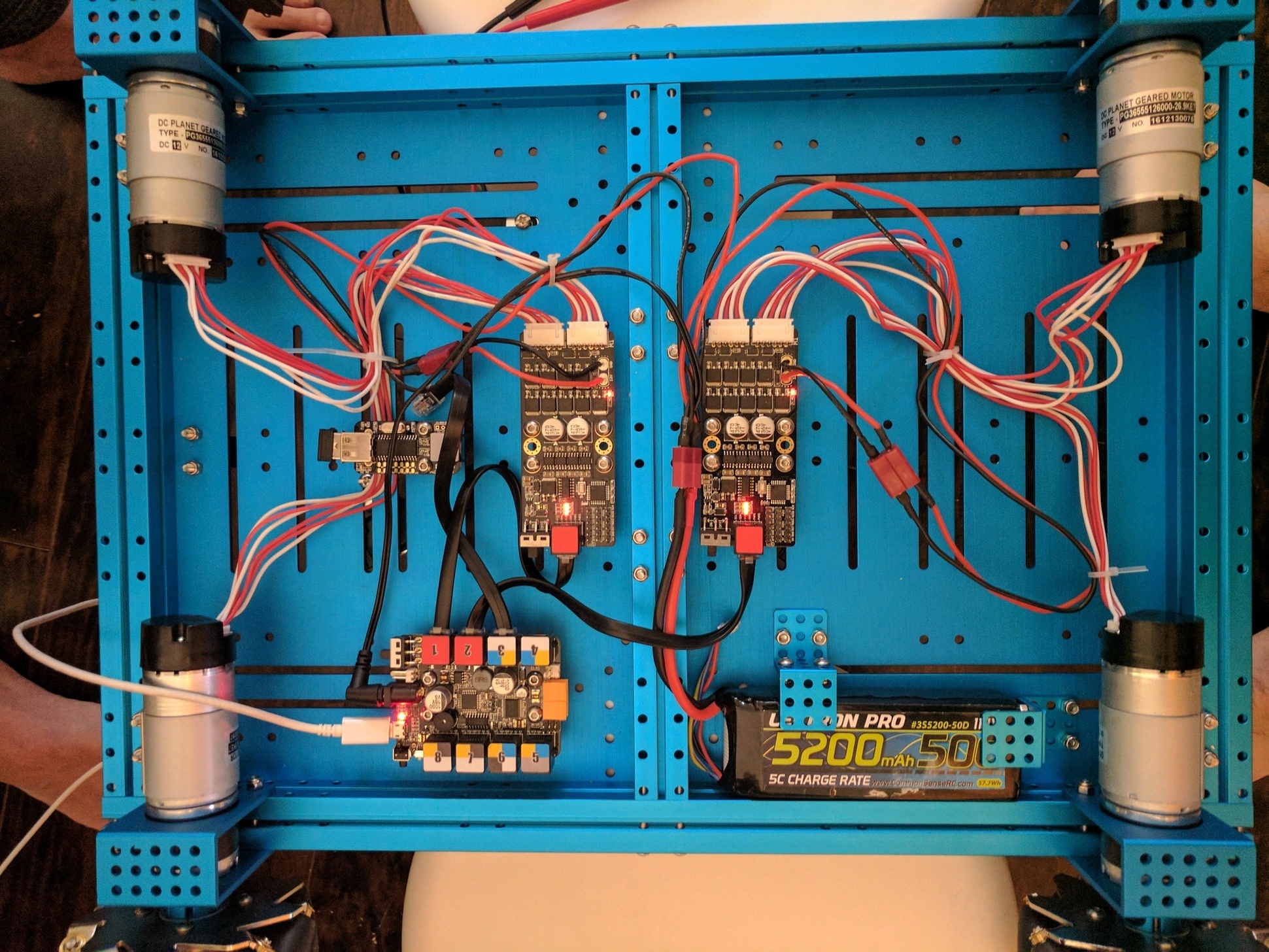
I’m having issues with a Mecanum. Motor control has always been flaky (have never been able to move individual motors reliably), but all of a sudden I cannot communicate at all with both of the high powered driver boards.
I’ve verified that they are both receiving 12V from the battery, checked at the input pads as well as verifying a constant 5V to pins 3 and 4 of the motor.
I have tried all off the example code, and initially it was working, and therefore don’t think it is a wiring / power issue. In retrospect, I can’t be certain that the sample code (Mecanum_Chassis_new) actually worked in regards to controlling an individual wheel. Now I cannot get anything to move at all.
Here is some sample code, that fails to make any of the wheels move:
#include “MeOrion.h”
#include <Wire.h>
#include <SoftwareSerial.h>
MeEncoderNew motor1(0x09, SLOT1); // Motor at slot1
MeEncoderNew motor2(0x09, SLOT2); // motor at slot2
void setup()
{
motor1.begin();
motor2.begin();
Serial.begin(9600);
}
void loop()
{
motor2.moveTo(360, 200);
motor1.moveTo(360, 200);
delay(2000);
motor2.moveTo(0, 100);
motor1.moveTo(0, 100);
delay(2000);
}
I’m at a bit if a loss at this point, so any help will be appreciated. Thanks.