Hi guys
I bought the new Mbot2 and I’m trying to programming some Avoid Obst. features.
Seems it works pretty well but I still got a problem.
I tried to reset the Mbot2 Motor and setting them to have different speed (in random RPM) after it turns right or left.
But seems the Mbot2 just recognized the first setting.
Please let me know
how to solve this issue.
Here the code:
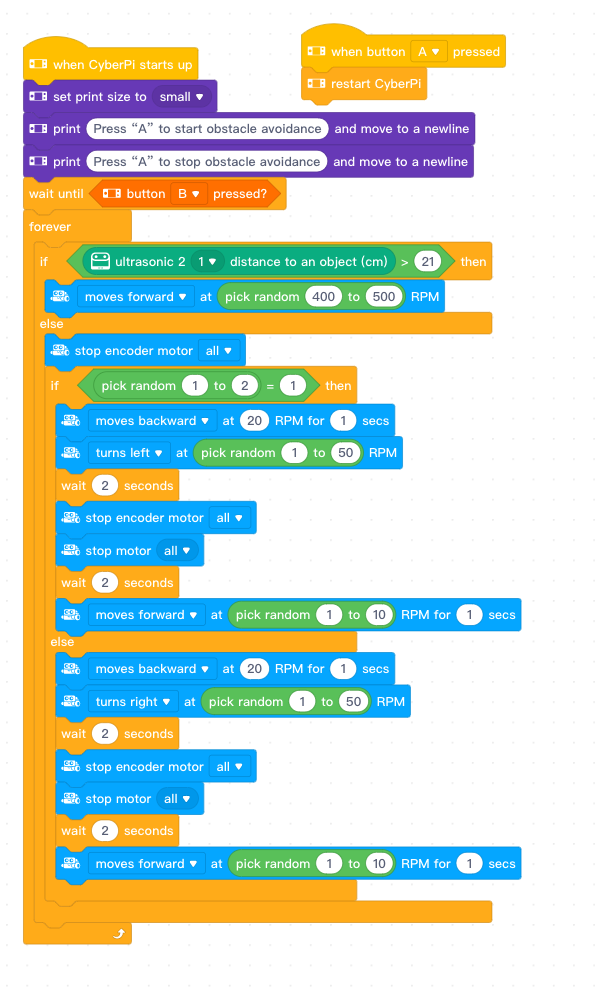
Neee

