Turning the mBot by gyro-control
The aim was to turn mBot for a specific angle, e.g. 90°.
Turning the bot by driving the motors for a specific time and power is very inaccurate, because of different friction of the ground and capacity of batteries.
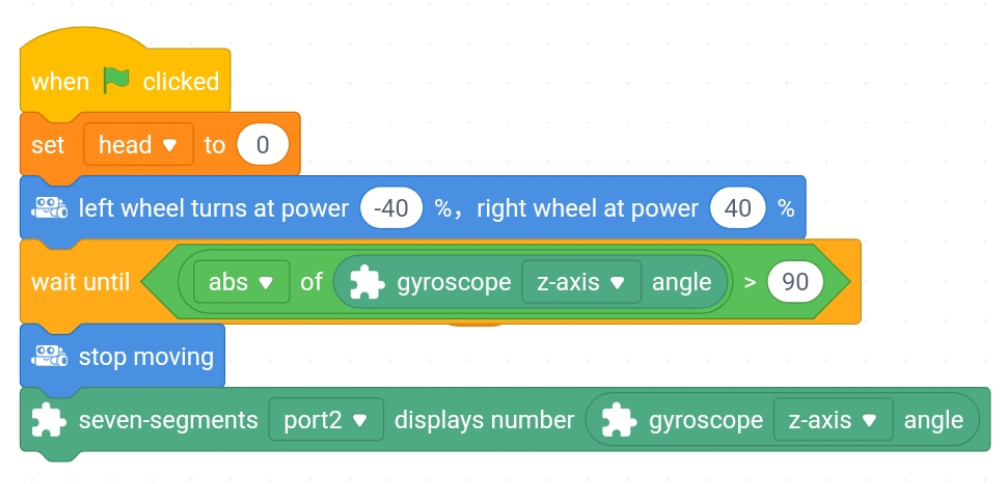
A good solution is to use a gyro-sensor and to integrate the angle-velocity over the time until the specified angle is reached.
The Me-3-axis-Gyrosensor can use to do this job.
Get sure, that you use the z-axis to get the right turning angle!
I got best results, when I determined an angle of less 5 degrees, e.g. for a wished 90° turn I gave it 85°.
I think it’s because of the inertia of mass and slipperyness of ground.
You can download Arduino-program under the following link:
Get sure, that the ports of motors and gyro sensor in the program correspond to your mBot configuration.
Have fun!
Sigtrygg
 In this case you have to predict the exact value with time, angle and speed …
In this case you have to predict the exact value with time, angle and speed …