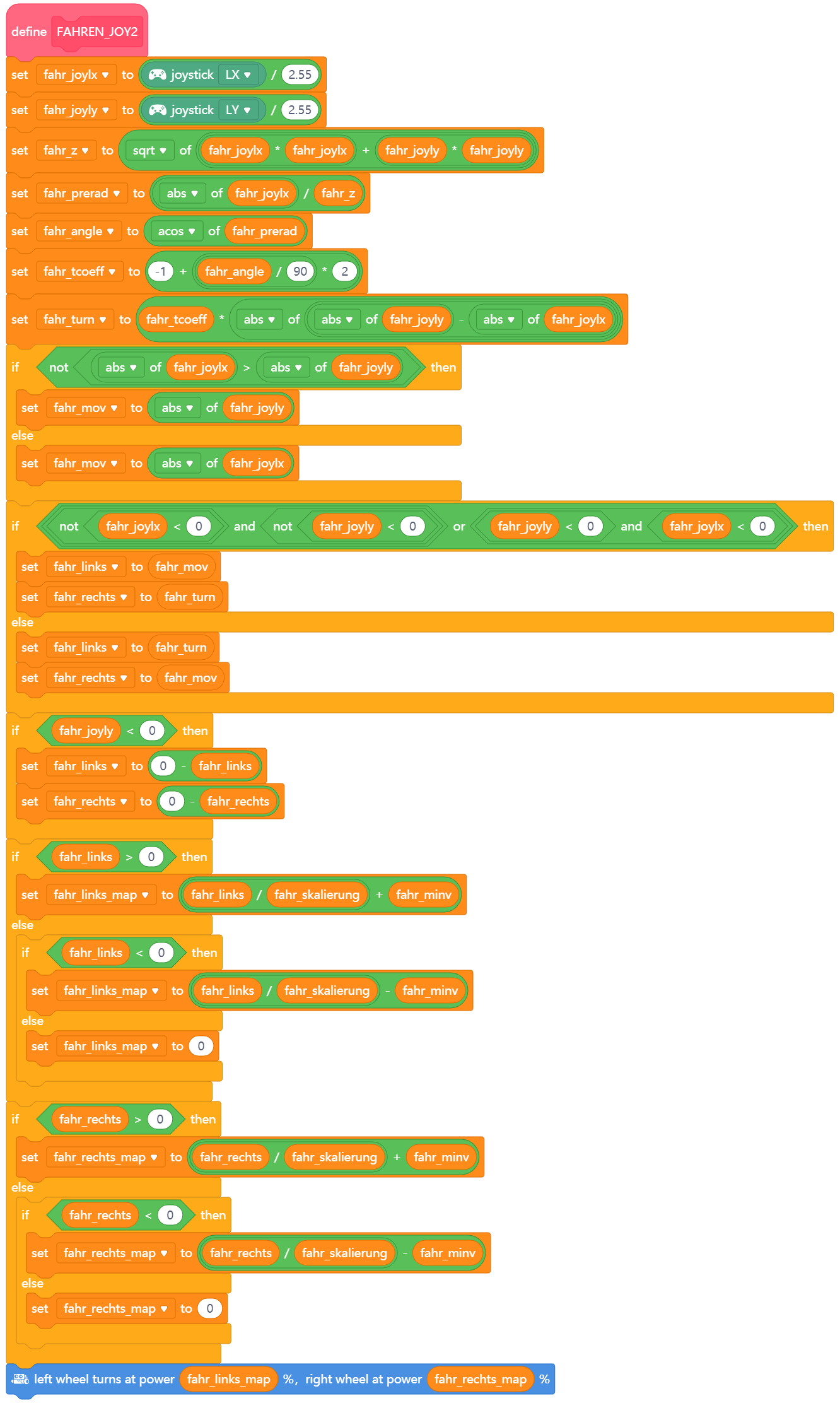
here is my solution for controlling the mbot via x and y axis stick on the wireless controller.
stick forward: right 100% and left 100%
stick left: right 100% and left -100%
stick backward: right -100% and left -100%
stick right: right -100% and left 100%
…