Recently I started building a competition robot, an mBot Ranger with the LineFollowerArray, but I ran into some problems…
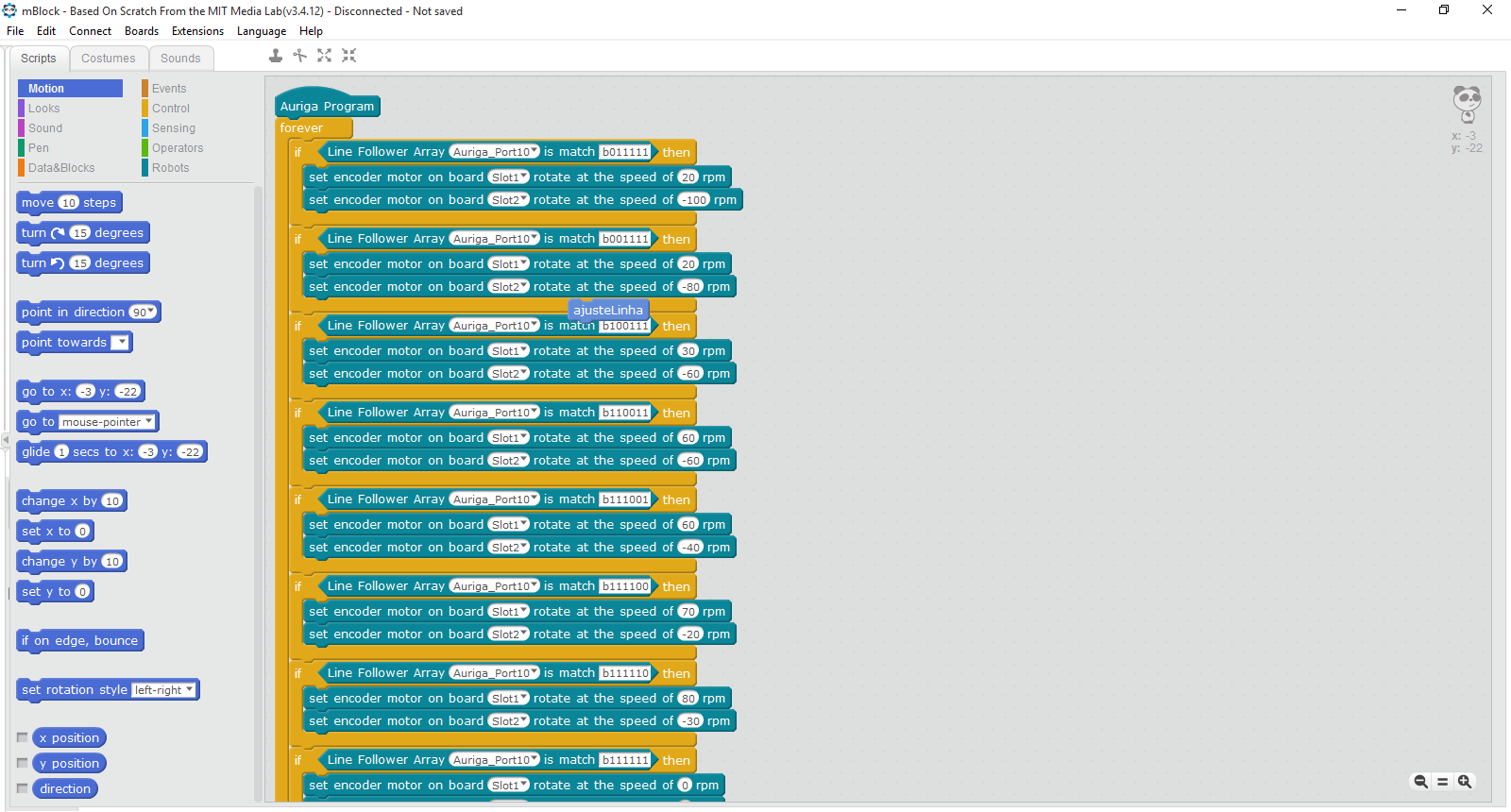
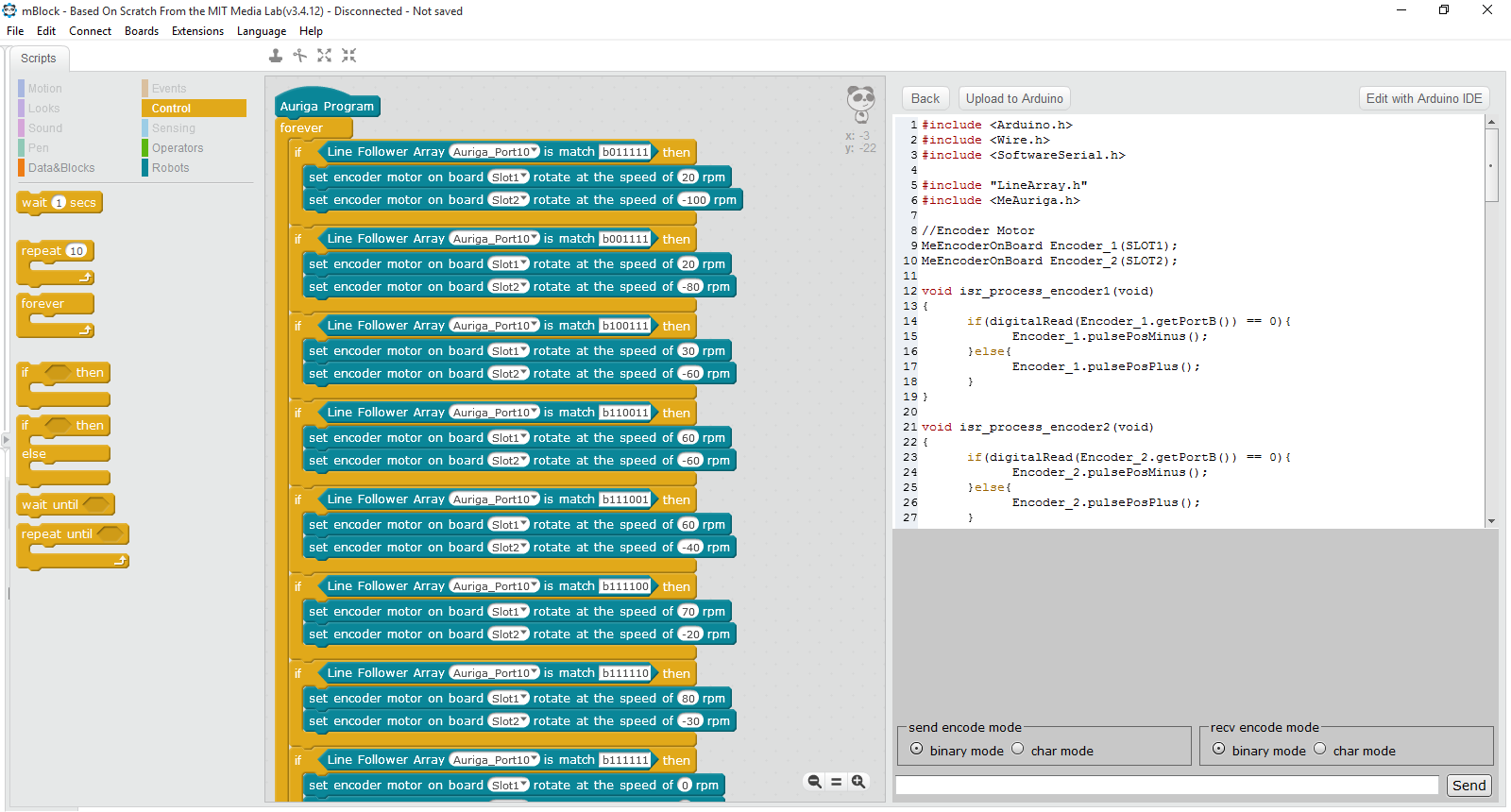
The array can detect a range of scenarios, as seen on my screenshot. The thing is, there is a quite noticeable delay between the sensor detecting that the robot is a bit off track and the EncoderMotor actually slowing down. So much so its getting frustrating trying to get to robot to stay on track.
Any help on how to figure this out ?