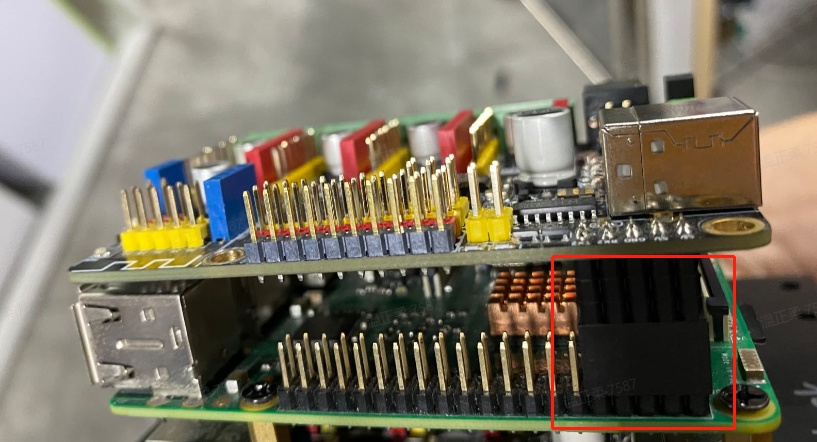
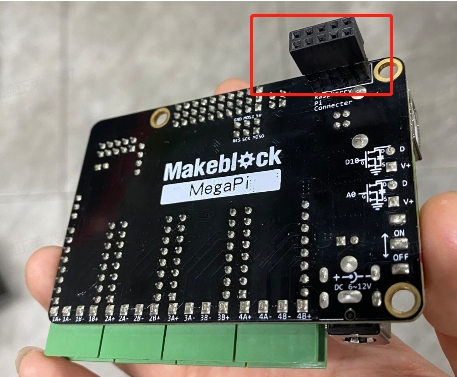
I have a mbot Mega here that I have connected to a RPi. I would like to have computer vision running on the RPi then the RPi can control the mecan wheels.
I have the RPi setup correct;y and have it connecting MegaPi and can get 2 of the 4 wheels to turn. Each motor driver has 2 DC motors connected to the green ports below the motor drivers. It seems that it will only run the first motor of each slot and not the second motor.
Here’s the code that I tested
from megapi import *
import timebot = MegaPi()
bot.start()bot.motorRun(1,50)
bot.motorRun(2,50)
bot.motorRun(3,50)
bot.motorRun(4,50)time.sleep(3)
bot.motorRun(1,0)
bot.motorRun(2,0)
bot.motorRun(3,0)
bot.motorRun(4,0)bot.close()


{kind=link}