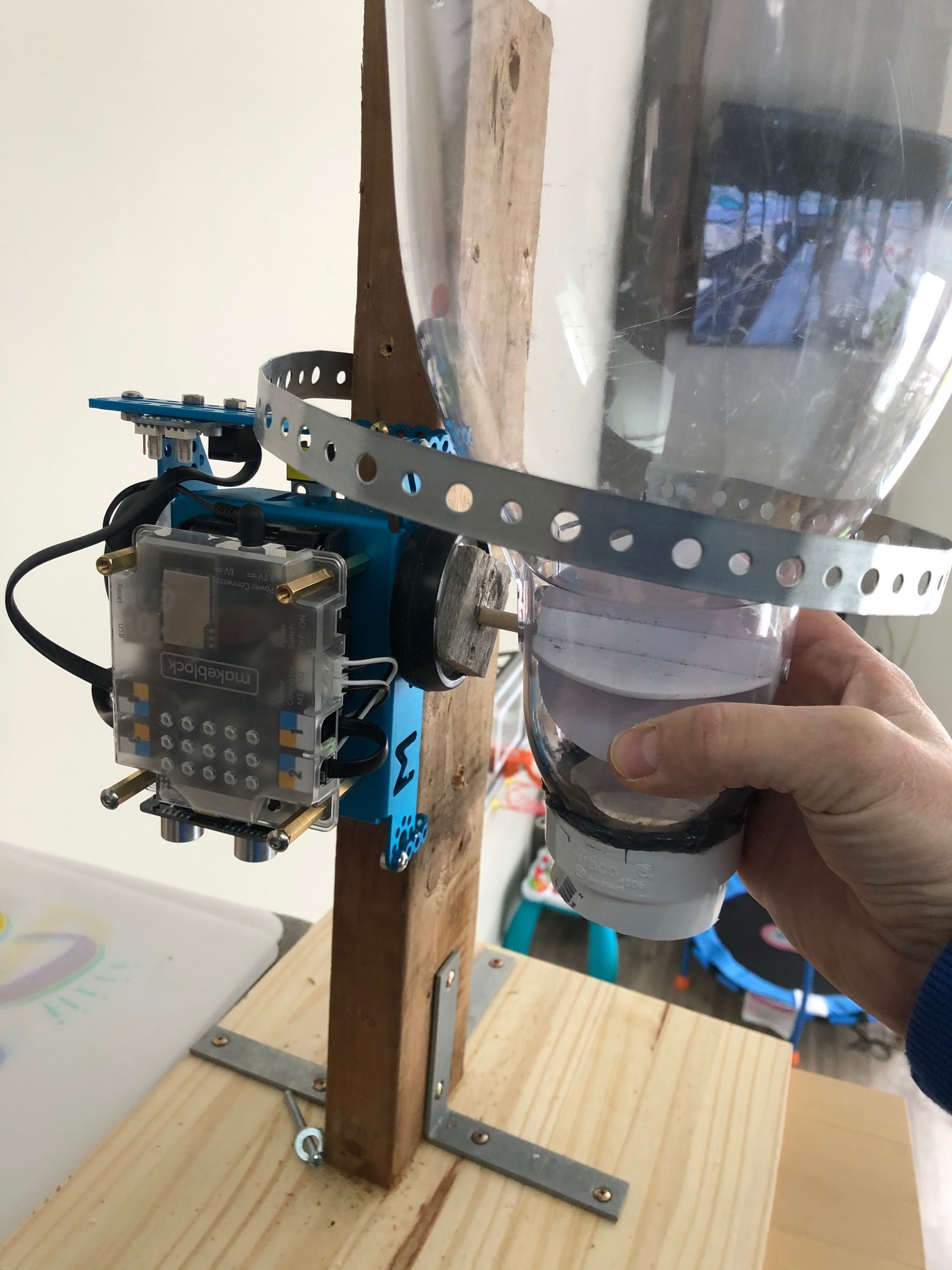
Hi - my kids are and I are new to mbot and decided to make a cat/dog feeder using this tuturial (which is actually for rasp pi).
We have a decent start, but the problem i’m running into is when hooking up the dowel to the wheel (i tried a servo as well), is that the power is there but i “slips” when need to run hard to turn the dowel to release cat food.
I’m thinking if there is a direct connection to the axle of the wheel vs attaching to the wheel could help and ellimate the issue. Any thoughts or suggestions to help with this? thank you