Dear Makeblock,
I was prepared to love your product but the misery I have experienced over the last few days has left me extremely frustrated and upset. I bought the Starter IR kit for my 10 year old daughter for her birthday. She is on a lego robotics team and she is interested in programming. Your company made it seem like it was as easy as buying the kit, building it with simple instructions, plugging it in to a computer and programming it. So far, after four days, I HAVEN’T EVEN MADE IT TO THE PROGRAMMING PHASE. My daughter has not been able to play with it at all. Now, let me recap so we are all clear.
-
Your instruction manual needs to be improved, bottom line. However, I did manage to build the robot TWICE. I had to take it apart to check all connections and make sure it was wired properly.
-
I managed to plug the computer into my mac and update the firmware with mblock. I should mention that it also crashed my mac since I am running Sierra and I had to yet again find a solution via your forum. If these are known issues, they should all be included in the instruction manual in the kit.
-
Now we run in to the real problem. I have yet to get a single program to work properly. If you see my other post you will notice that A) my default program works properly. If I push forward on the remote, it goes forward, backward, it goes backward, etc… HOWEVER when I tried this very simple program:
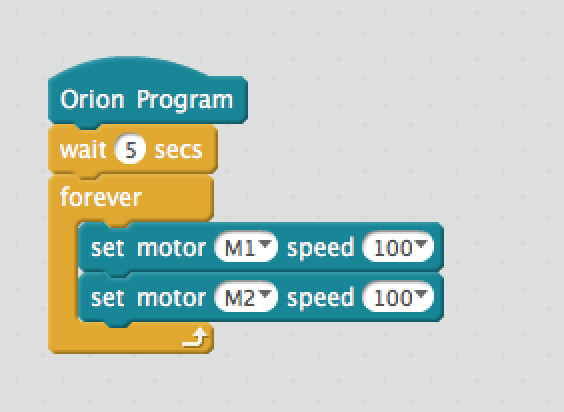
One track, the track with Motor 2 runs forward as it should. The other track, the one with Motor 1 runs backward.
Before you tell me about wiring let me point something out. Yes, I know if I switch the wires on the motor it works fine BUT THEN WHEN I LOAD THE DEFAULT PROGRAM the controls are messed up. I also know that I could just put -100 on the track but why should I have to do this? This is a program a 10 year old should be able to run right? I paid over 100 dollars. I want it all to work properly.
So please, please, pretty please, help me solve this problem and I might just change my mind and think this robot is great if my daughter can actually program it and make it work right. Heck, I might even buy more sensors and tell people your product is great. However, if I do not find a simple solution to this problem this robot is going in the garbage.
P.S. - You really should include about 10 examples of basic programs for the individual products in the manual with a step by step process.