I have a new project with codey rocky. (autonomous car or self driving car)
I have a question.
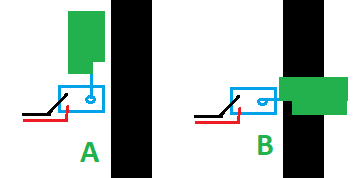
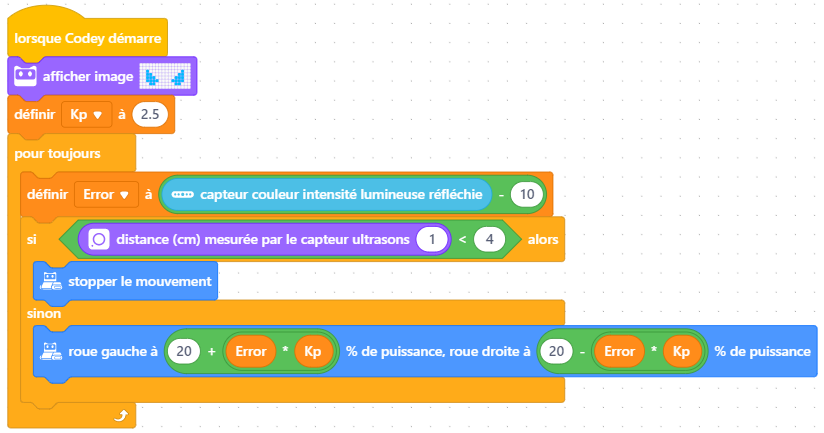
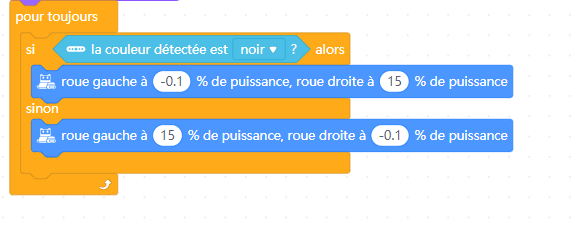
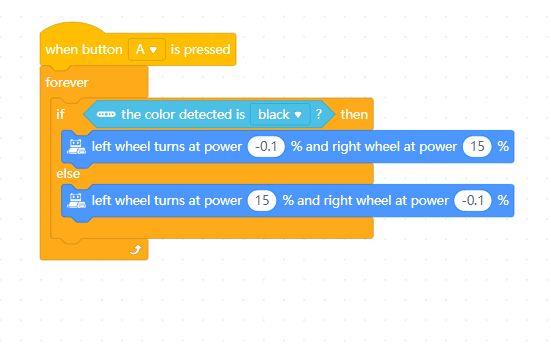
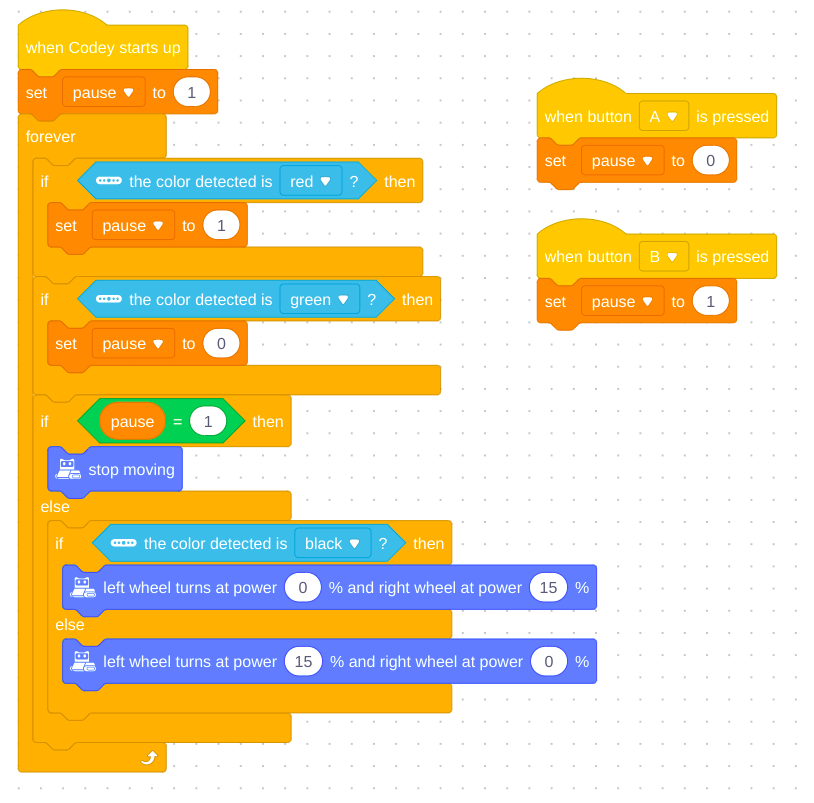
(1)I made line following and identify colors (red or green), But I can’t combine the two codes. If I combine the two codes, there will be an error. Please fix it and Please let me know if there is a way.
Please send me What I need to build autonomous car (or self driving car) and the code!
[Please refer to the attached video.]