Hello,
we (my daughter and I) are new to mBlock (got the Makeblock Starter Robot Bluetooth Kit for Christmas).
We have already created a few mBlock programs and are able to control the tank.
Now we would like to go to the next step and add sensor functionality to our code.
I would like to e.g. write a short code that will make the bot go forward while the distance reported by the sensor is greater than 10.
This is what I tried so far.
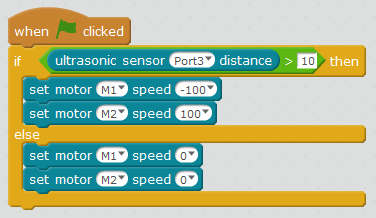
Test Sensor2.sb2 (74.6 KB)
What am I missing?
If I only read the value from the sensor (e.g. having the panda “say” the distance value), the sensor value is being reported correctly.
Thank you very much in advance for any hint.
Best regards,
N.Vi
