I am new to robot coding but my objective is to make mBot’s sensor follow the object in front instead of avoiding it.
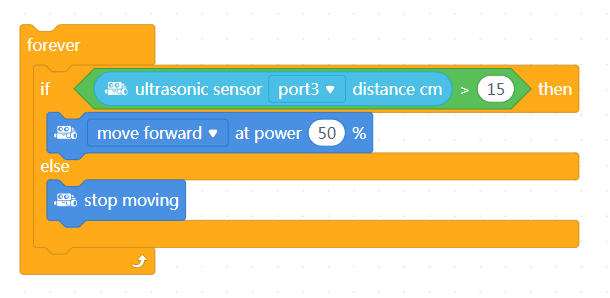
How do I program the ultrasonic sensor to follow the object infront?
 My pleasure
My pleasure
Nev
#5
also how do i connect this code with the line follower sensor to stop the robot when it detects nothing
system
#6
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.