Hi! I tried to code mBot using line follower sensor. I checked many entries, but I couldn’t find the answer: How can I make mBot turn smoothly with line follower sensor? I also checked that link: http://learn.makeblock.com/en/robot-kits/mbot/the-line-follower/. Can someone help me?
How can I make mBot turn smoothly with line follower sensor?
mrtist
#1
Andreas
#2
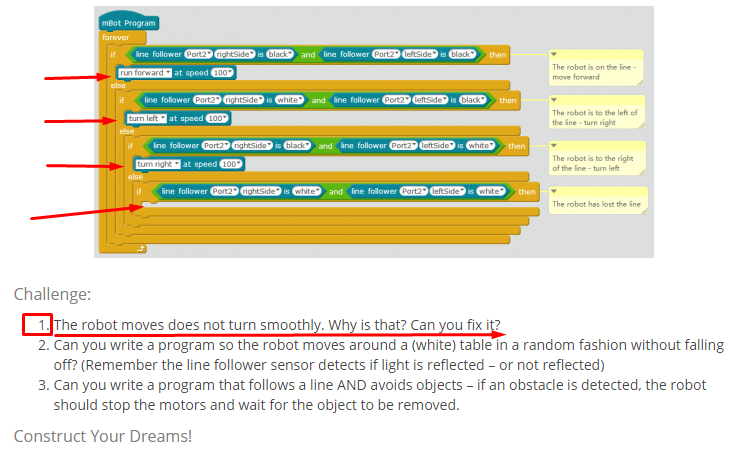
In the example above, the change from running forward to turn left/right is not smooth.
You might try to set one motor to speed +50 and the other to +100 to make smoother turns.
It may be that 50 is not enough power to turn the wheel, try higher value such as 75 then.
Depending on how narrow the line bends, you need another ratio between slow and fast motor, maybe 50 to 125. Try it yourself.
I used the notion of “nudges” in my maze solver:

You can likely make the turn smoother by lowering the wait time and/or the speed modifier.
mrtist
#4
Hi Andreas! Thanks for your answer, but it did not work well. I mean the mBot doesn’t turn smoothly as the original codes which comes in it. When I checked the original codes before I changed, they were in an .ino file (Arduino). So I couldn’t understand well.
mrtist
#5
Thanks for your answer. I lowered the waiting time, and I tried some more codes but it did not turn smoothly as the original codes which comes in it. 
funrobot
#6
mBot turns smoothly with pre-programming(line follower mode), as you know. I am trying to find how to code, but not satisfactory until now.