Hello,
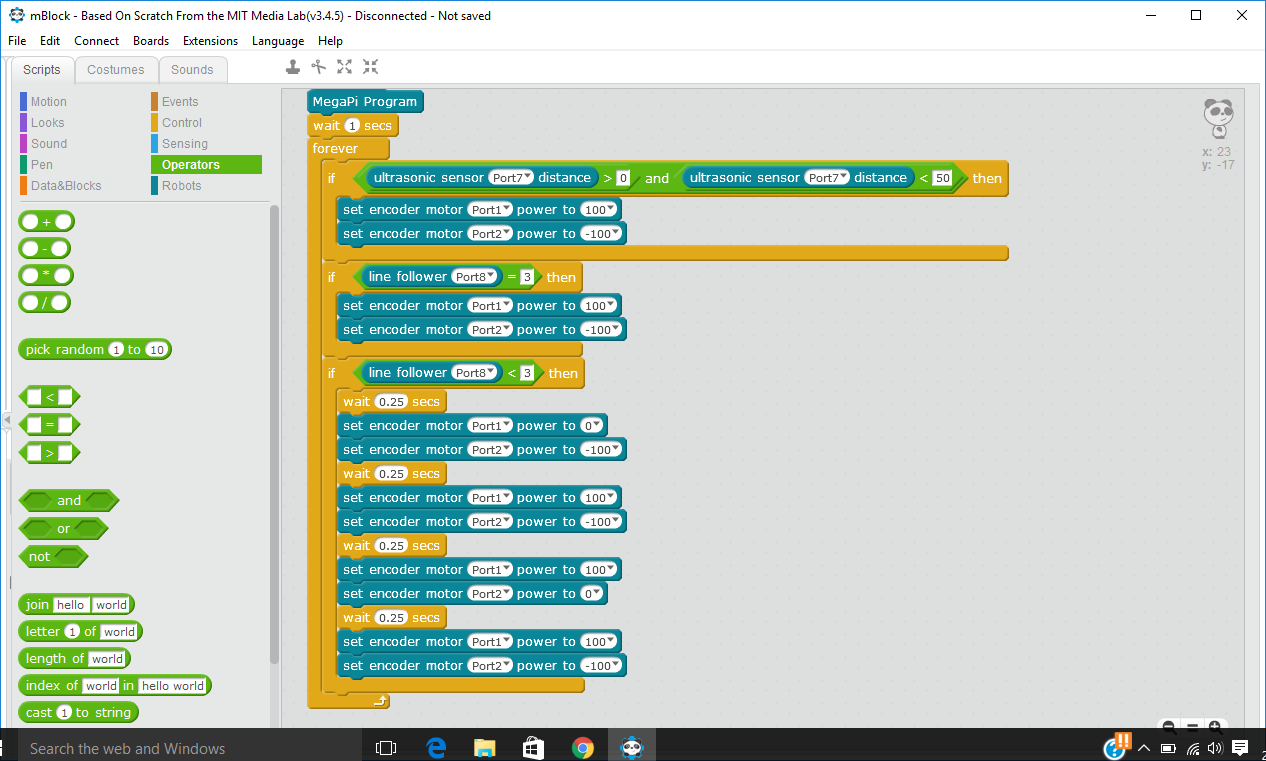
We have successfully gotten our robot to follow our hand using the ultrasonic sensor, and to follow a line using the line follower. But we are having a heck of a time combining these algorithms (e.g. following our hand up to the beginning of the line and then following it.) Can anybody see what we’re doing wrong?