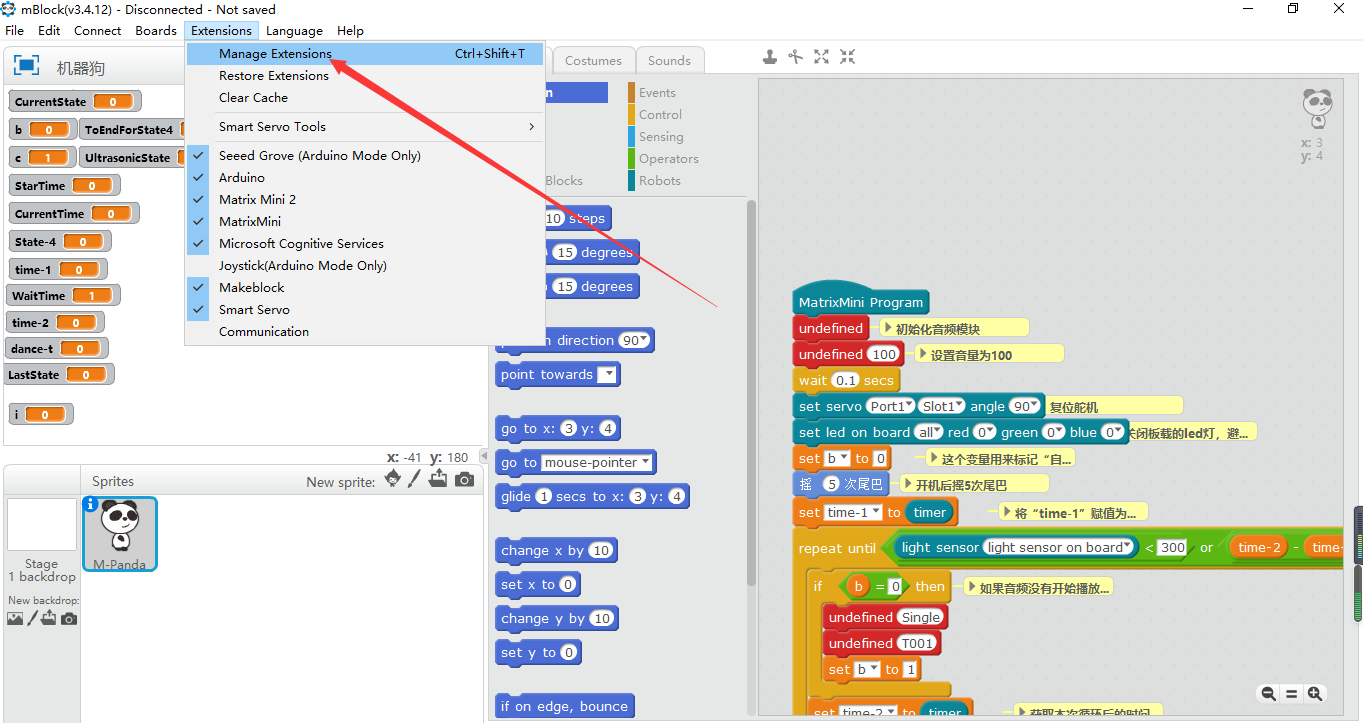
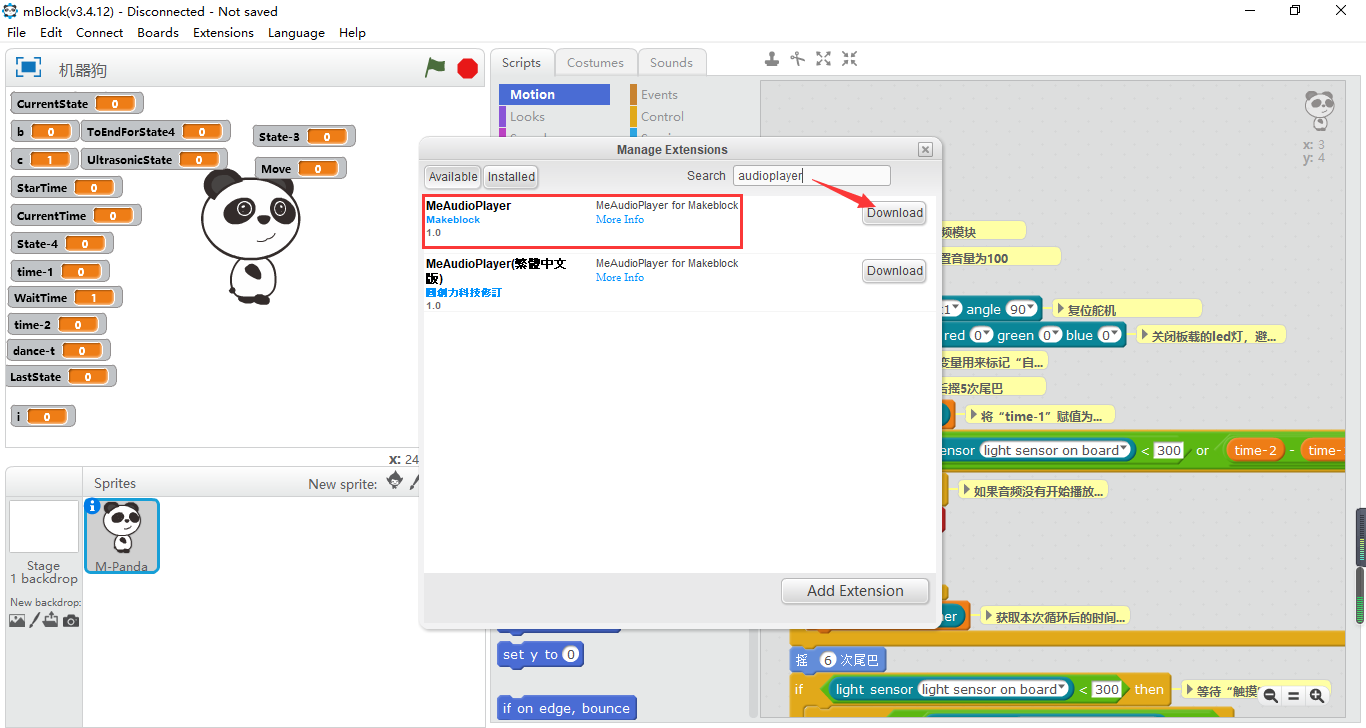
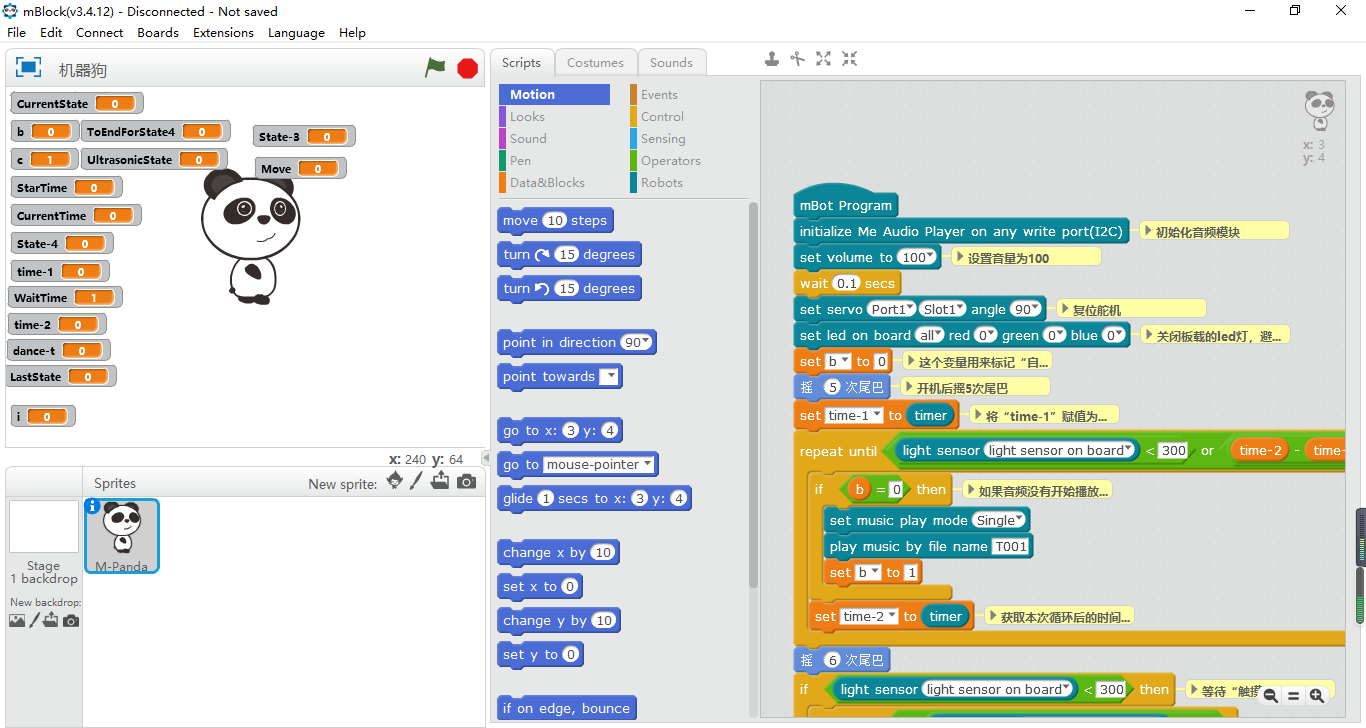
Hello, Connection in Mblock3 successful, program “dog” (talkative pet) from file loaded, upload not available, because of undefinde blocks:
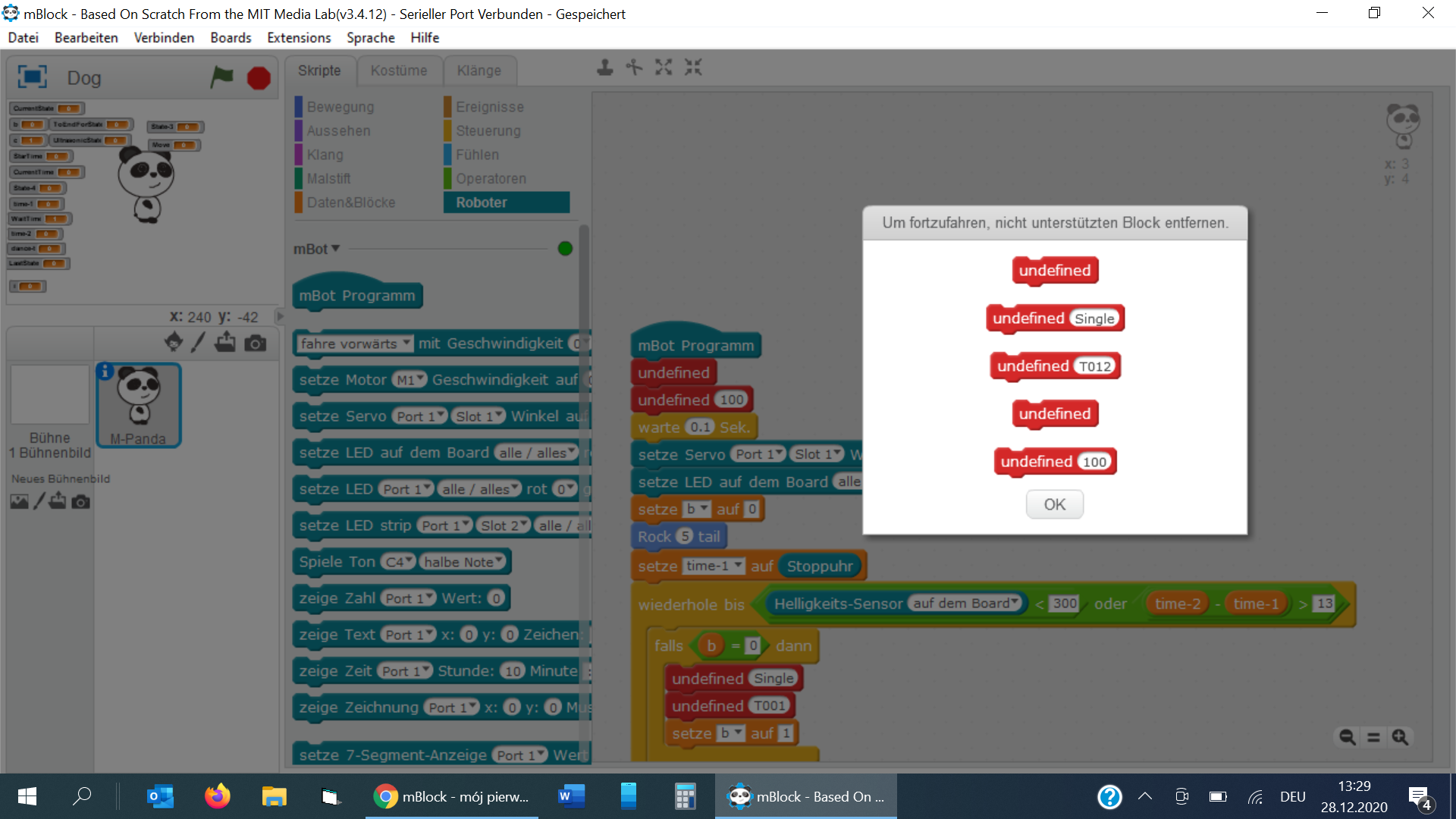
Hello, we failed in uploading the “dog” programm after firmware-update and successful connection:
Entwickler: mblock
2020-08-4 Finale Bearbeitung
Introduction
CyberPi is a main control board developed independently by Makeblock. With the compact structure and built-in interfaces, it can be easily extended. It supports mBlock 5 and mBlock-Python Editor; is applicable to multiple education scenarios including large-class teaching, community teaching, and online/offline education & training; covers multiple teaching fields including coding, makers, and robots; and thus can meet the diversified education needs, such as AI, IoT, data science, and UI design.
Start programming
-
Use a Type-C USB data cable to connect CyberPi to your computer.
-
In mBlock 5, click + add to add CyberPi from the device library.
-
Click Connect to connect your CyberPi to mBlock 5.
After your CyberPi is connected, mBlock 5 displays a message indicating successful
connection.
- Choose a program execution mode, Live or Upload.
mBlock 5 provides two program execution modes, Live and Upload. You can click to switch to modes.
Upload mode: In Upload mode, you need to upload the compiled program to the device. After being successfully uploaded, the program can still run properly on the device when the device is disconnected from mBlock 5.
Live mode: In Live mode, you can view the program execution effect in real time, which facilitates the debugging of the program. In this mode, you must keep the device connected to mBlock 5. If they are disconnected, the program cannot be executed.
Now, you can start to have fun with programming!
Add extensions
CyberPi supports abundant extensions, including various mBuild sensors, upload mode broadcast. Click + extension in the blocks area to add an extension from the extension center.
More help
For the user manual of CyberPi series products and operation guide of CyberPi, see CyberPi Series User Manual and CyberPi Operation Guide.
start processing code…
avr-toolchain\bin\avr-g++ -c -g -Os -w -std=gnu++11 -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -MMD -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10605 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I"C:\Users\Public\Programs\mblock\resources\app\mlink-v1\external\arduino\avr-library\variants\standard" -I"avr-library/cores/arduino" -I"arduino-libraries/makeblock/src" -I"arduino-libraries/makeblock/src/utility/avr" -I"avr-library/libraries/Wire/src/utility" -I"avr-library/libraries/Wire/src/" -I"avr-library/libraries/EEPROM/src/" -I"avr-library/libraries/SPI/src/" -I"avr-library/libraries/SoftwareSerial/src/" -I"arduino-libraries/arduino/WiFi/src/" -I"arduino-libraries/arduino/SD/src/" -I"arduino-libraries/arduino/Bridge/src/" -I"arduino-libraries/arduino/Temboo/src/" -I"arduino-libraries/arduino/Servo/src/" -I"arduino-libraries/arduino/Ethernet/src/" -I"arduino-libraries/arduino/TFT/src/" -I"arduino-libraries/arduino/SpacebrewYun/src/" -I"arduino-libraries/arduino/LiquidCrystal/src/" -I"arduino-libraries/arduino/GSM/src/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/utility/" -I"arduino-libraries/arduino/Esplora/src/" -I"arduino-libraries/arduino/Firmata/" -I"arduino-libraries/arduino/Firmata/utility/" -I"arduino-libraries/arduino/Keyboard/src/" -I"arduino-libraries/arduino/Mouse/src/" -I"arduino-libraries/arduino/Robot_Control/src/" -I"arduino-libraries/arduino/Robot_Motor/src/" -I"arduino-libraries/arduino/RobotIRremote/src/" -I"arduino-libraries/arduino/Stepper/src/" “C:\Users\klein\mblock-avr\temp\build\src\demo.cpp” -o “C:\Users\klein\mblock-avr\temp\build\src\demo.o”
avr-toolchain\bin\avr-g++ -c -g -Os -w -std=gnu++11 -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -MMD -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10605 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I"C:\Users\Public\Programs\mblock\resources\app\mlink-v1\external\arduino\avr-library\variants\standard" -I"avr-library/cores/arduino" -I"arduino-libraries/makeblock/src" -I"arduino-libraries/makeblock/src/utility/avr" -I"avr-library/libraries/Wire/src/utility" -I"avr-library/libraries/Wire/src/" -I"avr-library/libraries/EEPROM/src/" -I"avr-library/libraries/SPI/src/" -I"avr-library/libraries/SoftwareSerial/src/" -I"arduino-libraries/arduino/WiFi/src/" -I"arduino-libraries/arduino/SD/src/" -I"arduino-libraries/arduino/Bridge/src/" -I"arduino-libraries/arduino/Temboo/src/" -I"arduino-libraries/arduino/Servo/src/" -I"arduino-libraries/arduino/Ethernet/src/" -I"arduino-libraries/arduino/TFT/src/" -I"arduino-libraries/arduino/SpacebrewYun/src/" -I"arduino-libraries/arduino/LiquidCrystal/src/" -I"arduino-libraries/arduino/GSM/src/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/utility/" -I"arduino-libraries/arduino/Esplora/src/" -I"arduino-libraries/arduino/Firmata/" -I"arduino-libraries/arduino/Firmata/utility/" -I"arduino-libraries/arduino/Keyboard/src/" -I"arduino-libraries/arduino/Mouse/src/" -I"arduino-libraries/arduino/Robot_Control/src/" -I"arduino-libraries/arduino/Robot_Motor/src/" -I"arduino-libraries/arduino/RobotIRremote/src/" -I"arduino-libraries/arduino/Stepper/src/" “C:\Users\klein\mblock-avr\temp\build\src\MMA7660.cpp” -o “C:\Users\klein\mblock-avr\temp\build\src\MMA7660.o”
avr-toolchain\bin\avr-g++ -c -g -Os -w -std=gnu++11 -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -MMD -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10605 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I"C:\Users\Public\Programs\mblock\resources\app\mlink-v1\external\arduino\avr-library\variants\standard" -I"avr-library/cores/arduino" -I"arduino-libraries/makeblock/src" -I"arduino-libraries/makeblock/src/utility/avr" -I"avr-library/libraries/Wire/src/utility" -I"avr-library/libraries/Wire/src/" -I"avr-library/libraries/EEPROM/src/" -I"avr-library/libraries/SPI/src/" -I"avr-library/libraries/SoftwareSerial/src/" -I"arduino-libraries/arduino/WiFi/src/" -I"arduino-libraries/arduino/SD/src/" -I"arduino-libraries/arduino/Bridge/src/" -I"arduino-libraries/arduino/Temboo/src/" -I"arduino-libraries/arduino/Servo/src/" -I"arduino-libraries/arduino/Ethernet/src/" -I"arduino-libraries/arduino/TFT/src/" -I"arduino-libraries/arduino/SpacebrewYun/src/" -I"arduino-libraries/arduino/LiquidCrystal/src/" -I"arduino-libraries/arduino/GSM/src/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/utility/" -I"arduino-libraries/arduino/Esplora/src/" -I"arduino-libraries/arduino/Firmata/" -I"arduino-libraries/arduino/Firmata/utility/" -I"arduino-libraries/arduino/Keyboard/src/" -I"arduino-libraries/arduino/Mouse/src/" -I"arduino-libraries/arduino/Robot_Control/src/" -I"arduino-libraries/arduino/Robot_Motor/src/" -I"arduino-libraries/arduino/RobotIRremote/src/" -I"arduino-libraries/arduino/Stepper/src/" “C:\Users\klein\mblock-avr\temp\build\src\rgb_lcd.cpp” -o “C:\Users\klein\mblock-avr\temp\build\src\rgb_lcd.o”
avr-toolchain\bin\avr-g++ -c -g -Os -w -std=gnu++11 -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -MMD -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10605 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I"C:\Users\Public\Programs\mblock\resources\app\mlink-v1\external\arduino\avr-library\variants\standard" -I"avr-library/cores/arduino" -I"arduino-libraries/makeblock/src" -I"arduino-libraries/makeblock/src/utility/avr" -I"avr-library/libraries/Wire/src/utility" -I"avr-library/libraries/Wire/src/" -I"avr-library/libraries/EEPROM/src/" -I"avr-library/libraries/SPI/src/" -I"avr-library/libraries/SoftwareSerial/src/" -I"arduino-libraries/arduino/WiFi/src/" -I"arduino-libraries/arduino/SD/src/" -I"arduino-libraries/arduino/Bridge/src/" -I"arduino-libraries/arduino/Temboo/src/" -I"arduino-libraries/arduino/Servo/src/" -I"arduino-libraries/arduino/Ethernet/src/" -I"arduino-libraries/arduino/TFT/src/" -I"arduino-libraries/arduino/SpacebrewYun/src/" -I"arduino-libraries/arduino/LiquidCrystal/src/" -I"arduino-libraries/arduino/GSM/src/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/utility/" -I"arduino-libraries/arduino/Esplora/src/" -I"arduino-libraries/arduino/Firmata/" -I"arduino-libraries/arduino/Firmata/utility/" -I"arduino-libraries/arduino/Keyboard/src/" -I"arduino-libraries/arduino/Mouse/src/" -I"arduino-libraries/arduino/Robot_Control/src/" -I"arduino-libraries/arduino/Robot_Motor/src/" -I"arduino-libraries/arduino/RobotIRremote/src/" -I"arduino-libraries/arduino/Stepper/src/" “C:\Users\klein\mblock-avr\temp\build\code.cpp” -o “C:\Users\klein\mblock-avr\temp\build\code.o”
Command failed: avr-toolchain\bin\avr-g++ -c -g -Os -w -std=gnu++11 -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -MMD -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10605 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I"C:\Users\Public\Programs\mblock\resources\app\mlink-v1\external\arduino\avr-library\variants\standard" -I"avr-library/cores/arduino" -I"arduino-libraries/makeblock/src" -I"arduino-libraries/makeblock/src/utility/avr" -I"avr-library/libraries/Wire/src/utility" -I"avr-library/libraries/Wire/src/" -I"avr-library/libraries/EEPROM/src/" -I"avr-library/libraries/SPI/src/" -I"avr-library/libraries/SoftwareSerial/src/" -I"arduino-libraries/arduino/WiFi/src/" -I"arduino-libraries/arduino/SD/src/" -I"arduino-libraries/arduino/Bridge/src/" -I"arduino-libraries/arduino/Temboo/src/" -I"arduino-libraries/arduino/Servo/src/" -I"arduino-libraries/arduino/Ethernet/src/" -I"arduino-libraries/arduino/TFT/src/" -I"arduino-libraries/arduino/SpacebrewYun/src/" -I"arduino-libraries/arduino/LiquidCrystal/src/" -I"arduino-libraries/arduino/GSM/src/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/" -I"arduino-libraries/arduino/Adafruit_Circuit_Playground/utility/" -I"arduino-libraries/arduino/Esplora/src/" -I"arduino-libraries/arduino/Firmata/" -I"arduino-libraries/arduino/Firmata/utility/" -I"arduino-libraries/arduino/Keyboard/src/" -I"arduino-libraries/arduino/Mouse/src/" -I"arduino-libraries/arduino/Robot_Control/src/" -I"arduino-libraries/arduino/Robot_Motor/src/" -I"arduino-libraries/arduino/RobotIRremote/src/" -I"arduino-libraries/arduino/Stepper/src/" “C:\Users\klein\mblock-avr\temp\build\code.cpp” -o “C:\Users\klein\mblock-avr\temp\build\code.o” C:\Users\klein\mblock-avr\temp\build\code.cpp: In function ‘void _delay(float)’: C:\Users\klein\mblock-avr\temp\build\code.cpp:30:18: error: ‘millis’ was not declared in this scope long endTime = millis() + seconds * 1000; ^~~~~~
Failed to compile file code.cpp
arduino build failed.