Hi,
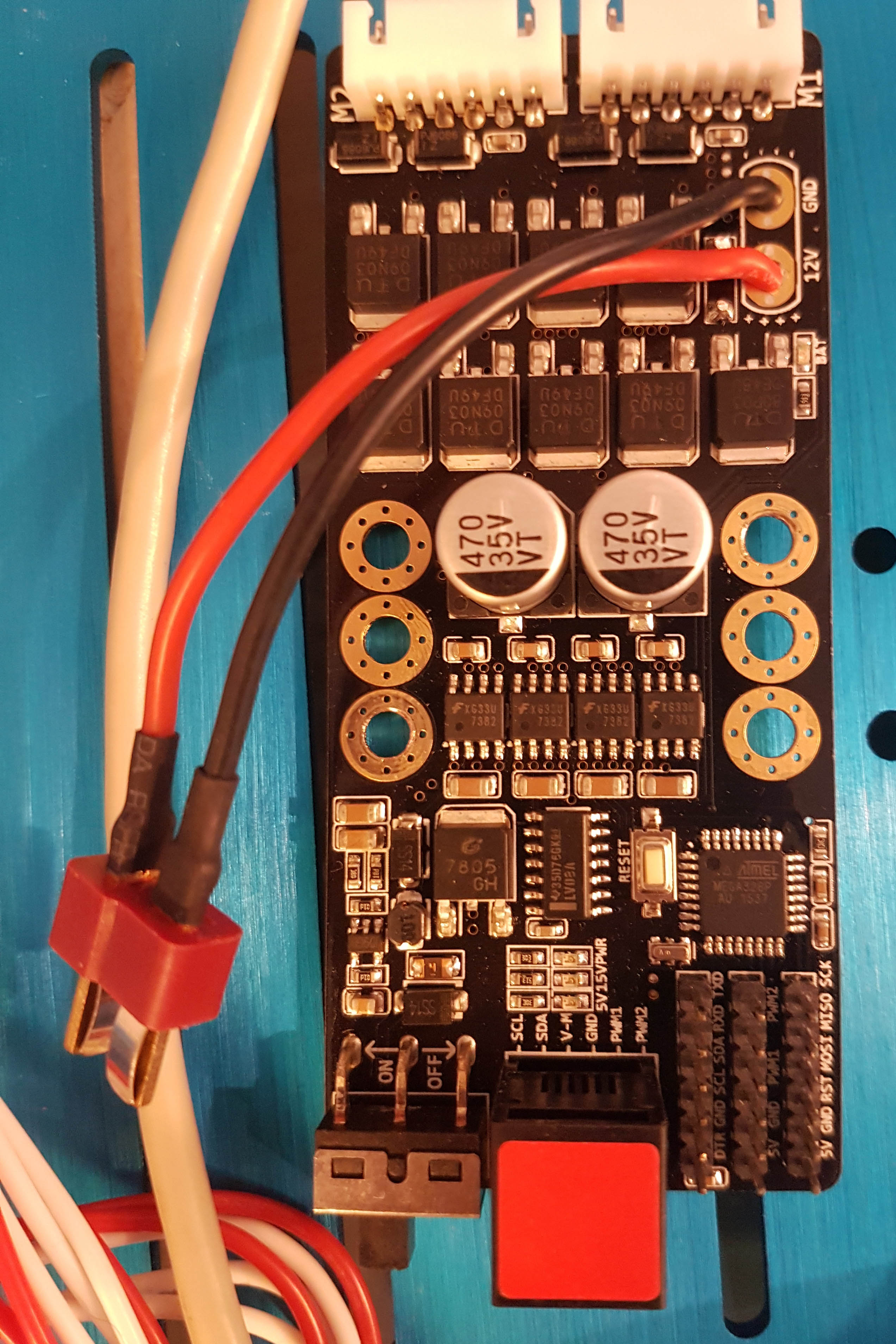
We have 2x Me High-Power Encoder Motor Drivers, and 4x 36mm Encoder DC Motors, all being controlled by an Orion board. Our problem is that the motors make a high pitched noise when you try to rotate them slowly.
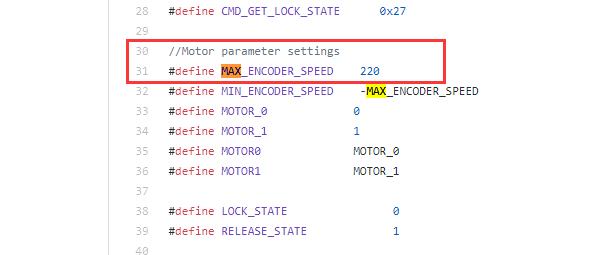
The reason for this is the frequency of the PWM signal being sent to the motors, which causes some kind of vibration in the motors at that frequency. So we want to change this frequency, to be high enough so humans can’t hear it.
To do this, we want to change and update the firmware on the driver boards. We have found this repository:
We have also figured out how to upload new code to the boards.
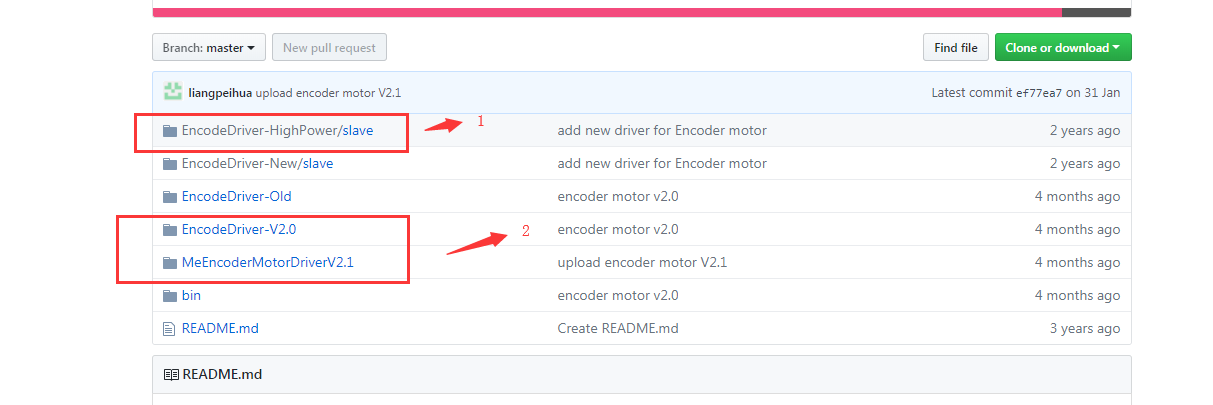
But what we don’t understand is what is the difference between the different firmwares in this repository?
EncodeDriver-HighPower/slave seems to work
EncodeDriver-New/slave seems to have wrong pins set, and also uses 2 H-bridge pins per motor. Does our board have this? If so, what are the correct pin numbers for these?
What are EncodeDriver-V2.0 and MeEncoderMotorDriverV2.1 used for? Do they apply to our driver boards?