@AAA Do you mean like make it slowly go faster and faster around turns, or slower and slower, of less choppy (eliminate correction turning)?
Trouble following custom track with mBot line sensors
Best_codes
#23
Well, there isn’t much you can do to prevent choppiness. 
One thing you can do:
Change the turn type. See below what I mean:
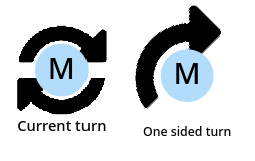
So have only an mBot wheel on one side turn, not both, so it turns rounded, not in place:

Try it and see how it does. @AAA
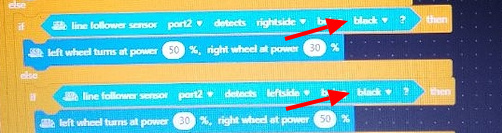
P.S. Keep in mind that depending on how sharp the bends in your track are, you may need to adjust the block, e.g.,
left 70% right 30%,
left 70% right 70%,
left 50% right 30%,
and so on.
Best_codes
#25
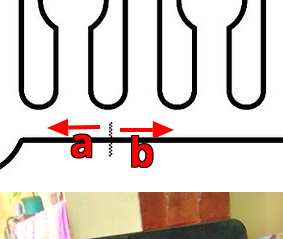
@AAA Assuming that the line is the start, does it move direction a or b from the start?
And where does it get stuck, what behavior is performed when it is stuck (does it turn, stop, etc.). Also, what is your code?
AAA
#26
@Best_codes
It moves from direction A.
As for how it gets stuck, it wiggles around the moment it starts to follow the track.


system
#34
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.