Hy,
my team and I for machine learning project choose to write PacMan game using CodeyRocky.
Due to the situation of COVID-19 and yesterday earthquake in Zagreb(Croatia, Europe) we were unable to try test this list of code on more than two CodeyRocky. We see that movement and rotation is very diffrent on our two CodeyRocky.
So I please that if anyone of you has CodeyRocky please try this list of code your robot and share results with us.
Also please tell me on which enviorment you will do the test. (exp. I do on parquet.)
Thank you very much.
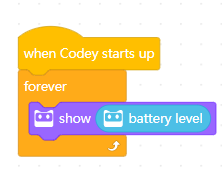
Test 0. - we want to see how much battery is depend on result.
Test 1. - I want you to measue distance that CodeyRocky pass.
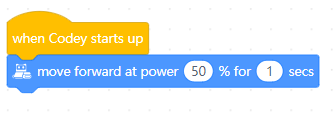
Test 2. - We want to see how much will distance will change
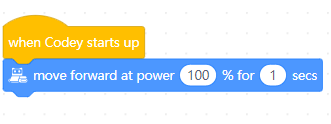
Test 3. - We want to see how much will distance will change
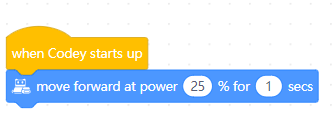
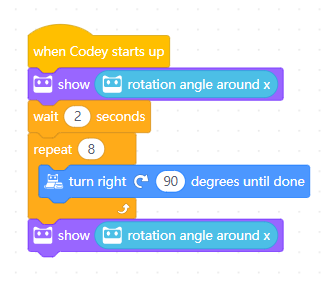
Test 4. - We want to see what will happen with rotation. To measure that we use rotation of x -angle so please calibrate your sensor(0 should be start number )
Video of test https://youtu.be/BihobXb0bL0
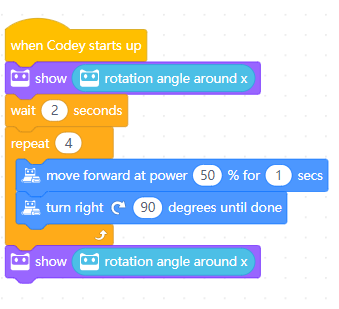
Test 5. Combination of moving and rotation.
Video of test https://www.youtube.com/watch?v=e5wxDbONpcQ
Tests of CodeyRocky - movement and rotation
Hi,
In COVIT-19 time and being teleworked, I took 2 minutes to do the code.
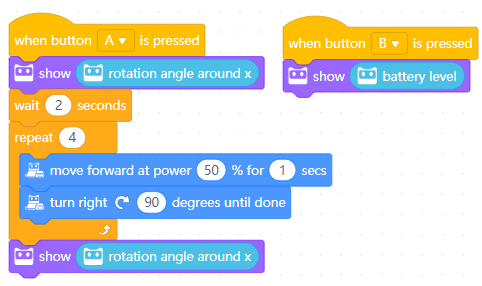
Here … I even calibrate the GYRO. I’m on Win10 Fr Home and my Codey Rocky comes from the original Kickstarter.
The number 70 is the value of my battery :
Video
Michel
Hi,
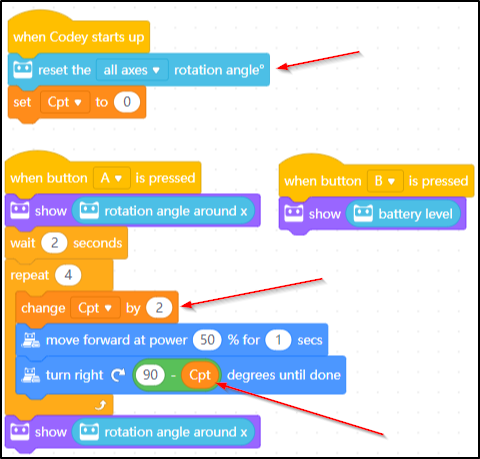
I don’t know what you’re looking to do but here is the code for adjusting Codey. I don’t know if this is the real solution but it comes straight to the initial and straight placement.
Thank you @Crackel for your video.
My question is why you choose change Cpt by 2?
Did you test and see it or is there any other reason?
Hi,
In fact, the Codey does not rotate exactly 90 degrees. It must depend on the dirt on the engines, maybe the battery but one thing is certain: It is not super precise, even after calibration.
Conclusion: I adjusted a little to get exactly to the starting point. I suppose that the adjustment will have to be done regularly.
Finally: The 980 degree is reasonable for walking but not precise enough for a perfect 90 degree.
Anything that steers by skid steer will always have very bad accuracy for turning as it involves skidding to turn.
Although other designs steer much better nothing ever steers exact this is why in robotics it is common to use a sensor to help identify error and make adjustment to lower the error this is known as a feedback loop.
You will need to do something like this:
store rotation angle around x in rotation_varible
turn right() at power (50)%
repeat until (rotation angle around x < rotation_variable + 89)
__________if (rotation angle around x < rotation_variable + 80) then (turn right() at power (10)%)
stop moving
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.