Thanks @srothe, I’m going to give it another crack over the next couple of days and will let you know how I get on.
Always possibility of ‘operator error’ (brain fade) so to speak, so I’ll check I’m not doing anything ultra dumb.
I’ll also look at a timestring as you suggest.
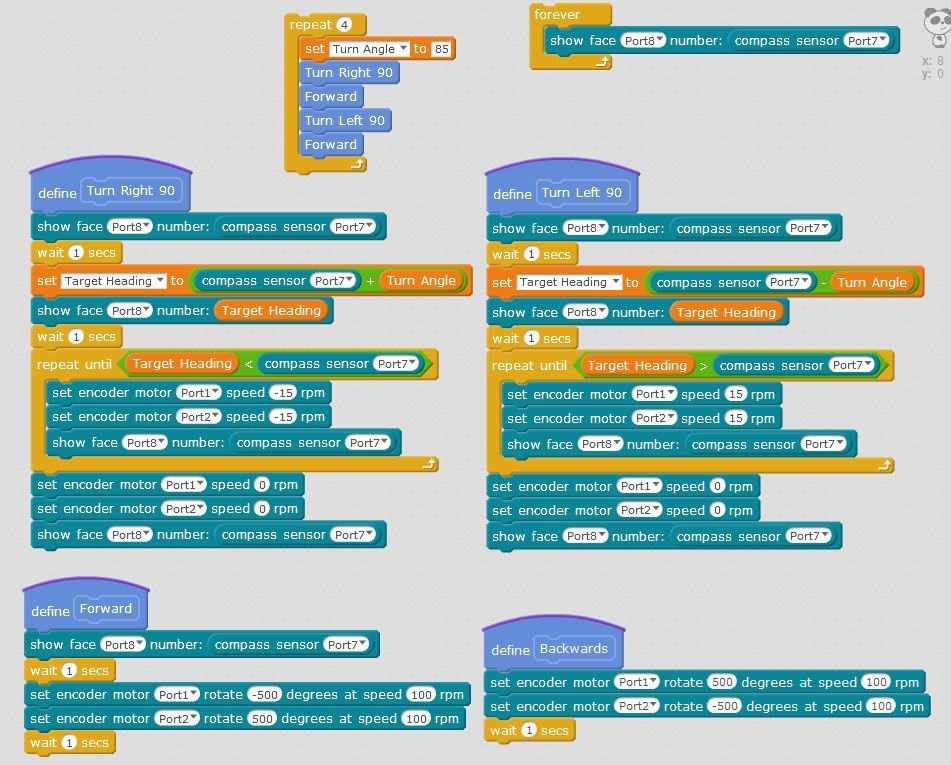
What seemed to be happening is the at the x and y just wobbled with a small ± 0.1 and essentially stayed locked, but the z axis ticked away like a clock.
I was indeed hoping it was going to be super simple as you describe. Just read value and go for a target offset.
A slow drift of even a degree or two a minute would not be disaster, but this is quite a lot more rapid than that.
Any pointers at useful documentation for either the Gyro or the compass would also be massively appreciated, but maybe nothing quite as technical as that datasheet. Thanks again, Nick