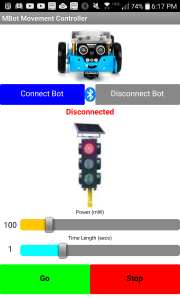
According to @chuckmcknight 's book, chap 12, “Robotic Movement Part 1”, the MBot kit comes with analog motors which are applied with some levels of power. We need to measure its distance with a given amount of time for each level of power. With those measurements, we are able to calculate its average speed for each level of power. For the task, we need to set up a table for each level of power with an amount of time given. For the table, we select 7 levels of power from 100 to 250 with a step of 25 each and 5 amounts of time from 1 to 5 seconds. It requires 35 setting changes to fill the table. That means we need to make 35 trips to change those settings from your computer to the floor for the bot to run and measure its distance with your measuring tape. That brings me thinking of some kind of robot controller. I happen to know MIT App Inventor, sister of MIT’s Scratch. So, I developed a mobile app for Android-based smartphones. Here is the screen shot:
Ref: Use mBot with App Inventor (V1.9) See the link. Don’t forget to upload default MBot firmware first before running the bot.
Attached zip file contains both source (.aia) and app (.apk) for your Android mobile.
Distance Measurement.zip (3.2 MB)
Enjoy your adventure.
Geo