Robo Chalk Pattern Tracer
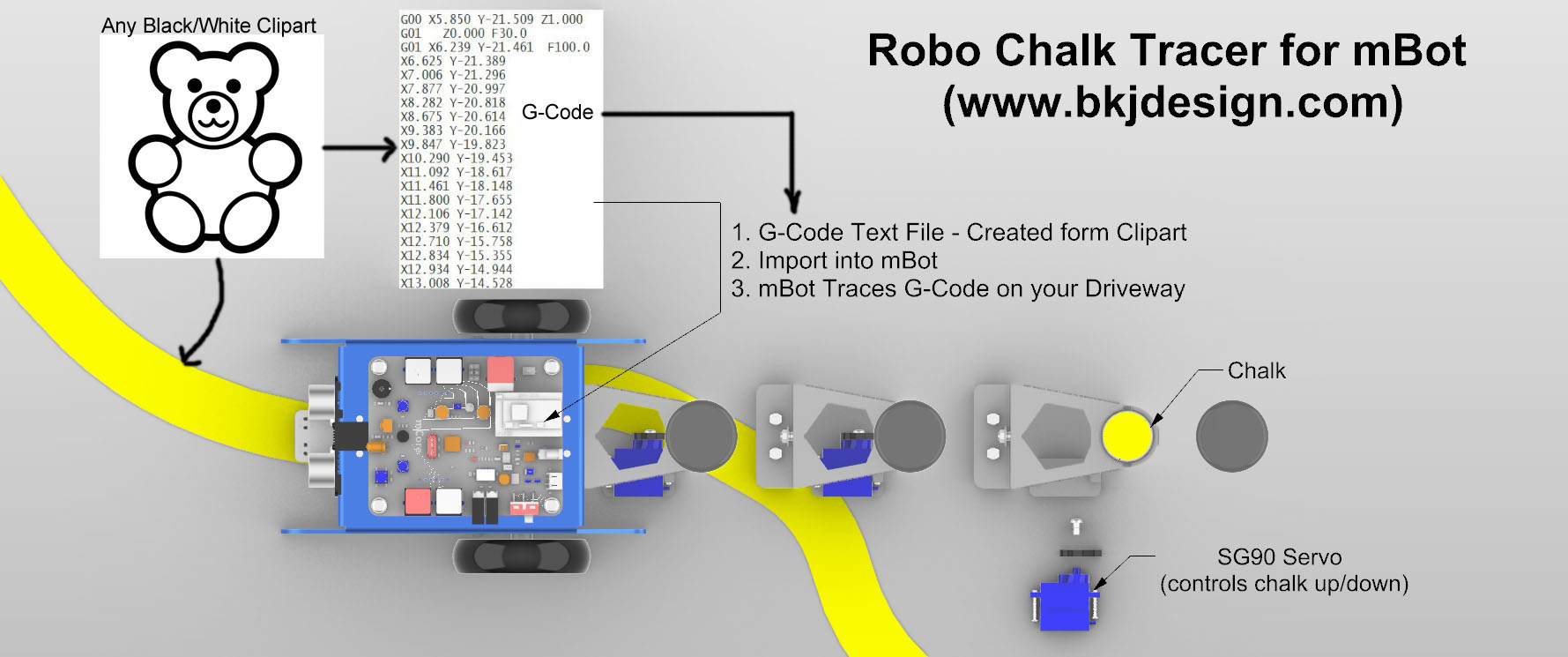
Objective: use the mBot to trace a chalk pattern on a sidewalk or driveway at any scale.
The mBot would be programmed to follow any black and white clip-art pattern. The pattern would be converted into a vector path using the free Inkscape software. This path profile would be converted into a G-Code text file using the G-Code generator in Inkscape. (FYI there are other programs that do this as well)
I have the mechanics and hardware worked out along with free software options to generate the G-code clip-art pattern text file the robot would follow. Have been exploring the mBot, but I need coding help. I don’t know how or if the mBot can be set up to read a G-code text file of X Y coordinates that create the pattern. There is also a SG90 servo that controls the chalk up/down for when the mBot moves from pattern to pattern. The servo would be activated by the Z1 for chalk up and Z0 for chalk down in the G-code file. The total servo rotation would be from 0 -> 30 degrees.
Contact: Dave Mills - BKJ Digital Design - (www.bkjdesign.com) 716 374 0779
Only comment I have gotten so far…
This looks like an awesome project!
We stock two versions of the mBot, both with Bluetooth pairing. The mBot can be programmed using a version of Scratch 2.0 called mBlock which is a graphical programming language, or with C++ via the Arduino IDE.
I’m not sure whether you would be able to establish communications with the mBot effectively and feed it live instructions, but compiling the G-code or X Y coordinates into a program that can be executed, then re-programming the bot for the next image to draw via Bluetooth should be do-able.