Hello, let me introduce my “Mbot self clean field”
This project is based on Mbot with gyro and mini gripper.
The aim is to detect object “alone” , to get it into the arm and to move the object far from the way
I’ve developped with scratch and all the sequences are full automatic, no human assitance required
- Mbot start to scan around him and detect the nearest object (after creat a map infront of sonar sensor)
- Then Mbot is moving to the nearest object in order to get it with the gripper
- Finally, Mbot is moving the objet behind him and try to scan & detect a new instance of object
The result here :
https://youtu.be/uAjaId3Oj2U
This sequence was filmed in debug mode … sorry for some delaying and slow execution
You can see more details here :
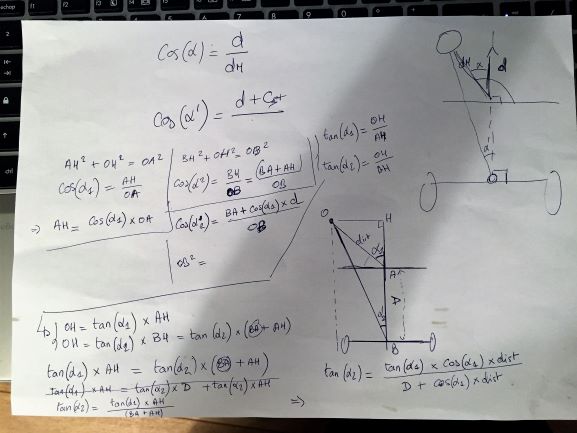
In order to place Mbot front of the object, some trigo was necessary