I have taken the new user tutorial.
I did hit a post limit once…
For some reason, upload mode works/…
Will try your code…
THanks!
Any other suggestions?
Mblock wait() function is not accurate
V205
#21
Best_codes
#22
Great!
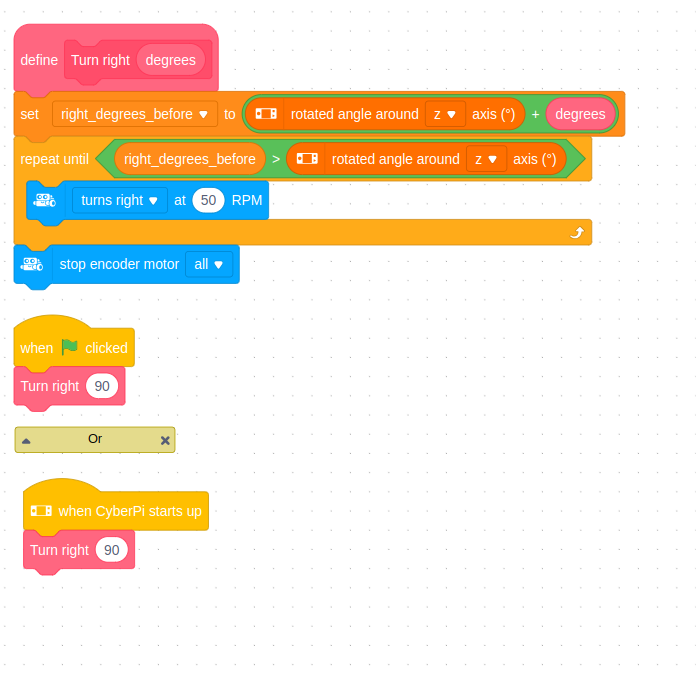
If the code doesn’t work, mention me as @Best_codes. Also, first try changing the values of both the onboard gyro sensor blocks to y-axis or z-axis. If it still fails, try doing [block] - degrees instead of +.
As a last resort, change it all back and use turn left in the custom block instead. I will test the block tomorrow, and send you the mBlock project.
Hope that keeps you busy, and have a nice rest of your day / night? Hmm… @V205

 )
)
V205
#32
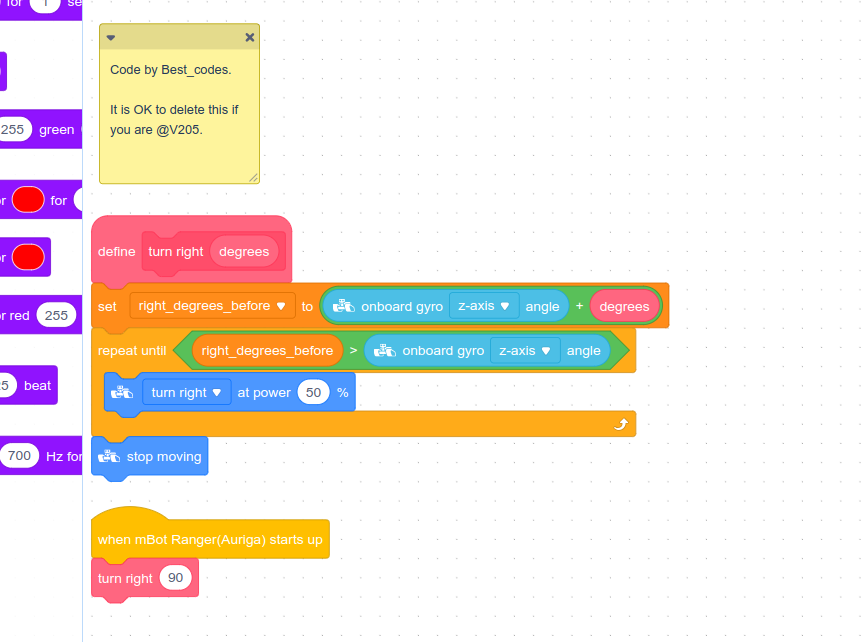
Could I have a photo of the ranger version?
Don’t really want to download(no preview……)
Thanks
V205
#34
Ok thanks!
Will try it out later.
BTW, do you know how to take the plastic cover off the ranger’s auriga?
Thanks
Best_codes
#35
Yes. You can just pull it apart if you are careful. It is snap together., if I remember correctly. @V205

CommandeR
#38
I haven’t got round to building Nervous Bird yet - but as far as I could tell, the balancing routines for MegaPi were built in to the default firmware for the board.
The following may be of some value:
