My preference is that it be done in scratch because my kid is familiar already with scratch. He has a competition and I’d rather that he wrote the program himself rather than me having to help him in Arduino.
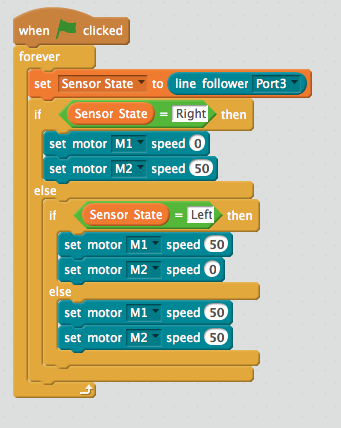
@indream , I loaded up the xunxian project and tried it. It looks like the “s” is the various states of the line follower and can be either 0,1,2,3 .
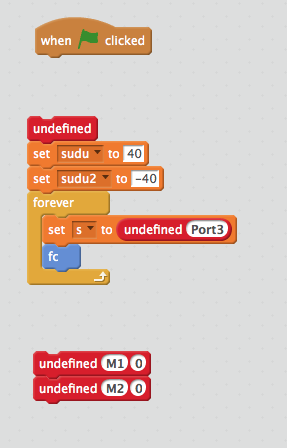
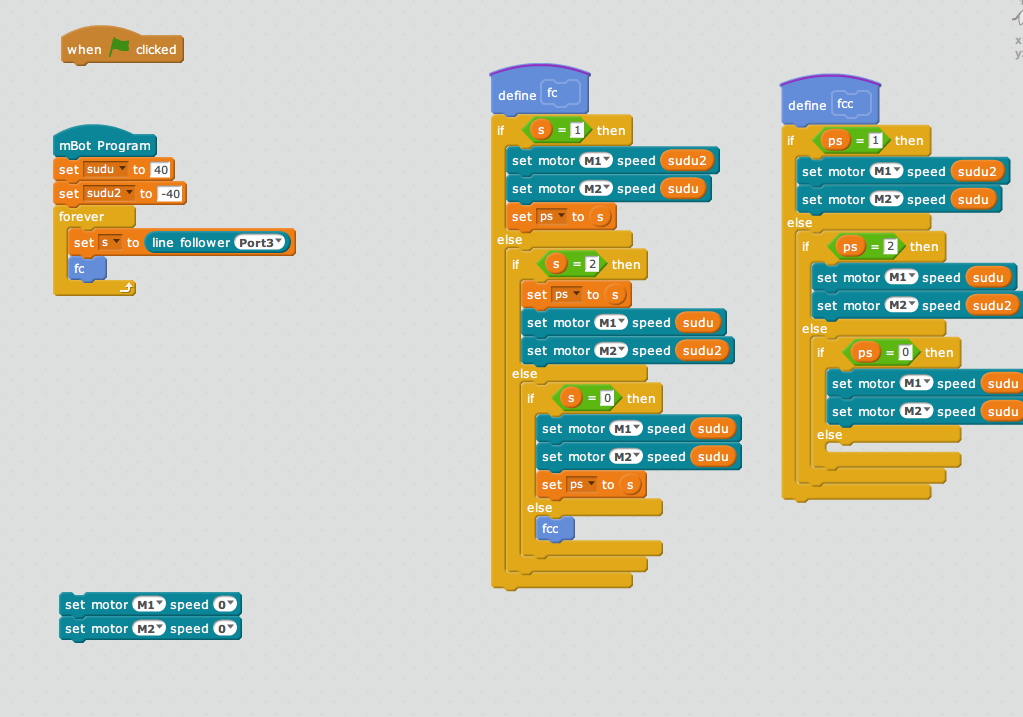
Is there a way to see what the undefined functions are as well as what’s in the FC function block?
I’m attaching a screenshot of the program.
I’ve also run into problems where sometimes the s values are being returned in the scratch environment and sometimes not.