Are there some information or a datasheet for the25mm DC encoder motor available?
I could not find anything about it, What are the data for the encoder?
Background is that I want to use the motor without the Me Encoder Motor Driver.
Michael
Are there some information or a datasheet for the25mm DC encoder motor available?
I could not find anything about it, What are the data for the encoder?
Background is that I want to use the motor without the Me Encoder Motor Driver.
Michael
Hi MichaelT,
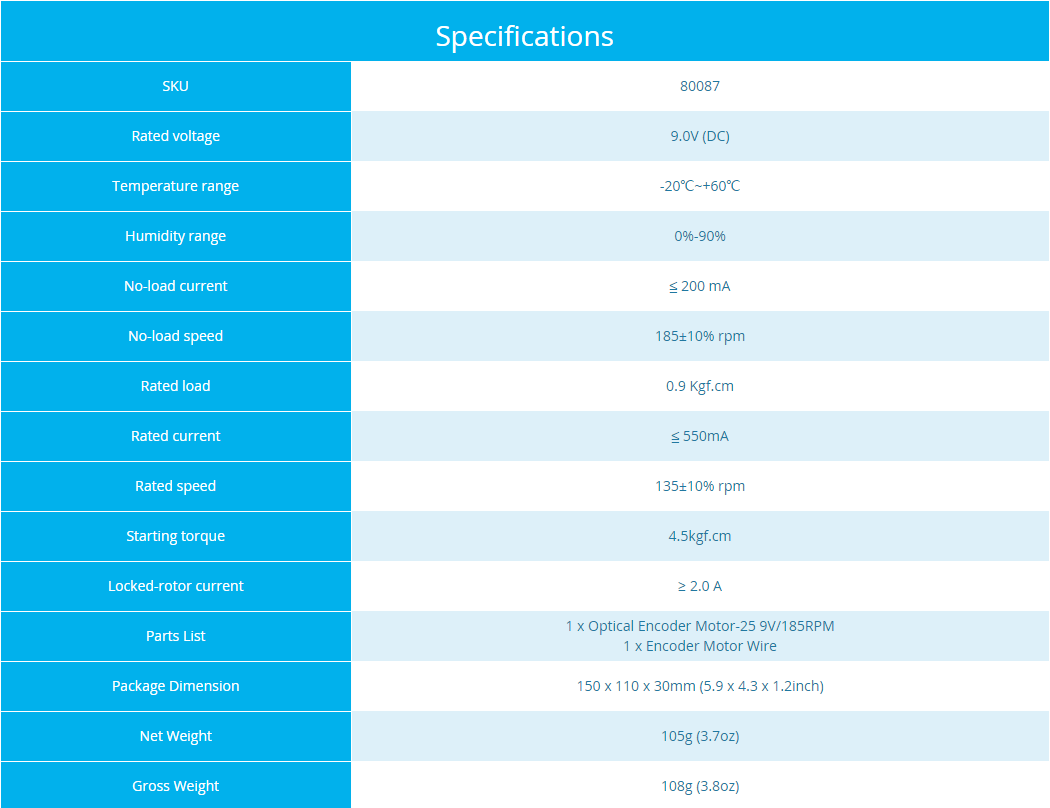
Here is the link where listed the specs for the 25mm encoder motor.
Thanks for the info. I know about that link and information. What I am missing is information about the encoder, e.g. ticks per revolution, technology and so on…
BTW some additional information about mechanical dimensions would be interesting too (at least for people who did not have the motor already) and also about the gear ratio.
Michael
Hi MichaelT,
The ticks per rev is 8 and the gear ratio is 1:46 which can be found on the motor.

As for the mechanical dimensions, it is 25mm motor, we are not sure what other dimensions you what to know.
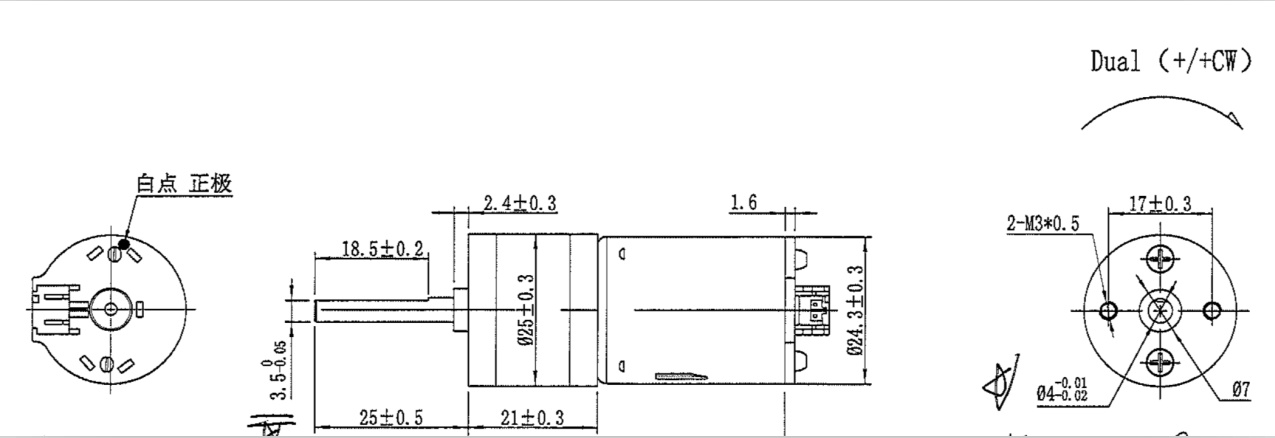
Other dimensions were diameter and length of the shaft and the mounting holes.
These are espacially of interest for people who did not have the motor (yet) and want to use it in a non Makeblock environment. In fact I was thinking about a Pololu encoder motor (https://www.pololu.com/product/2284) which was much better described.
I also missed a diagramm of the connector and a description of the encoder signals.
Michael
Hi MichaelT,
Here is the size info for the 25mm encoder motor.
As for the others, I am afraid that we don’t have such info.
Thanks for the size info.
But I am a little bit astonished that you/Makeblock (as a manufacturer and seller of the encoder motor) have no info about pin definition and other electrical data of the encoder such as input and output voltage and used current. I assume the encoder has a Hall effect sensor and is a quadrature encoder. The 8 ticks per revolution is for the rising and falling edges of both the A and B outputs, right?
Michael
Hi MichaelT,
Actually, it is our customized encoder motor from our supplier. We have done packaging on it and make it very easy to use with our drivers. I am afraid we don’t have the deep level parameters for it.
For the assume, actually it is not hall effect sensor, but the photoelectric Sensors and every time the motor turns over that gap, there will be a level signal. Besides, the encoder is quadrature encoder.