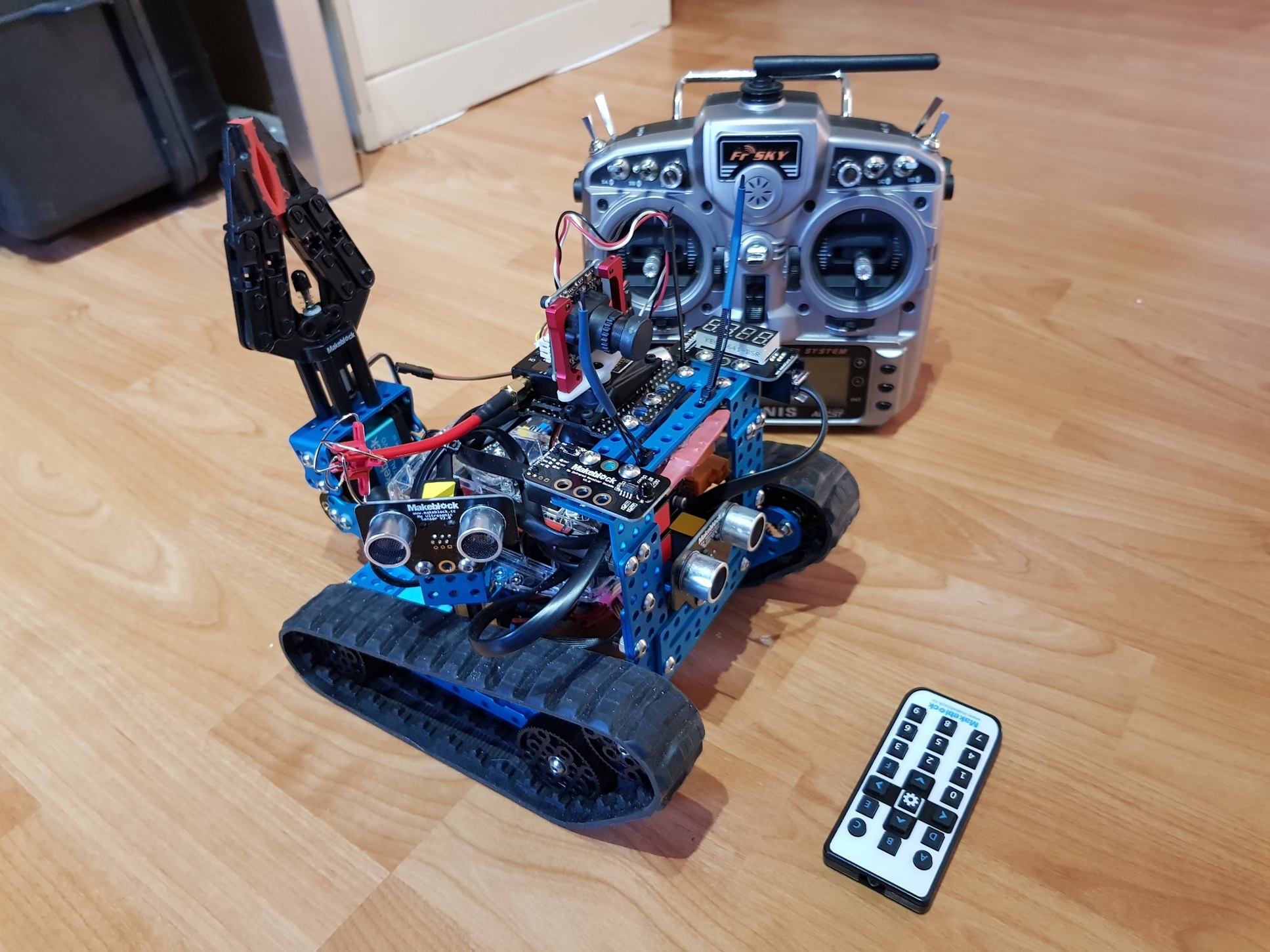
I finally finished my ranger. In addition to the IR control and autonomy modes I have added an S.BUS receiver to control the robot from an aircraft RC transmitter. It has a full 16 channels available. I have also added a 5.8 GHZ FPV camera on a 360 modified pan servo for live video feed. All functions other than the video link are controlled by the Arduino and nothing connects direct to the RC Receiver.
Im running the S.BUS into a hardware serial port on the Arduino so all controls are super smooth.
I have taken this setup over 400m away and still get control and clear video so much fun to be had.