I’m probably overlooking something obvious, but I thought I’d ask rather than spending the next day or two trying to sort this out on my own. I downloaded 3.2 (after not being able to get a program to work in the previous version. I wrote a basic “move forward, stop, move backward” program in mBlock, and I have that working. My problem is that I can’t figure out how to program the IR remote.
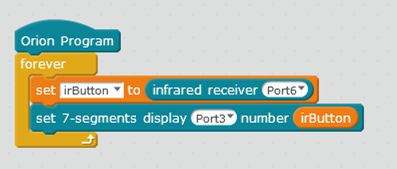
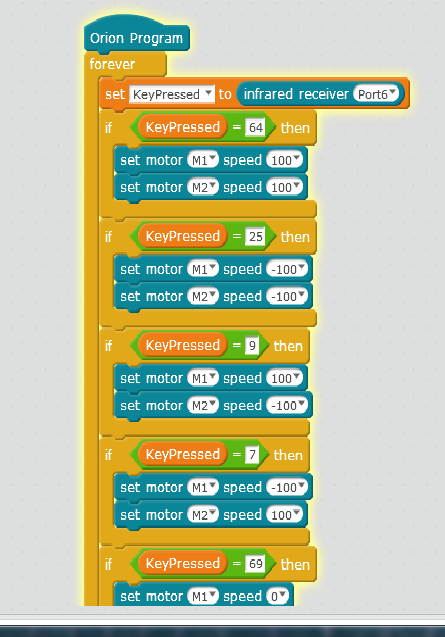
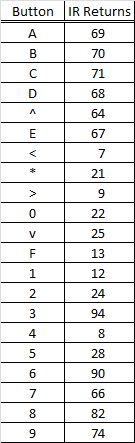
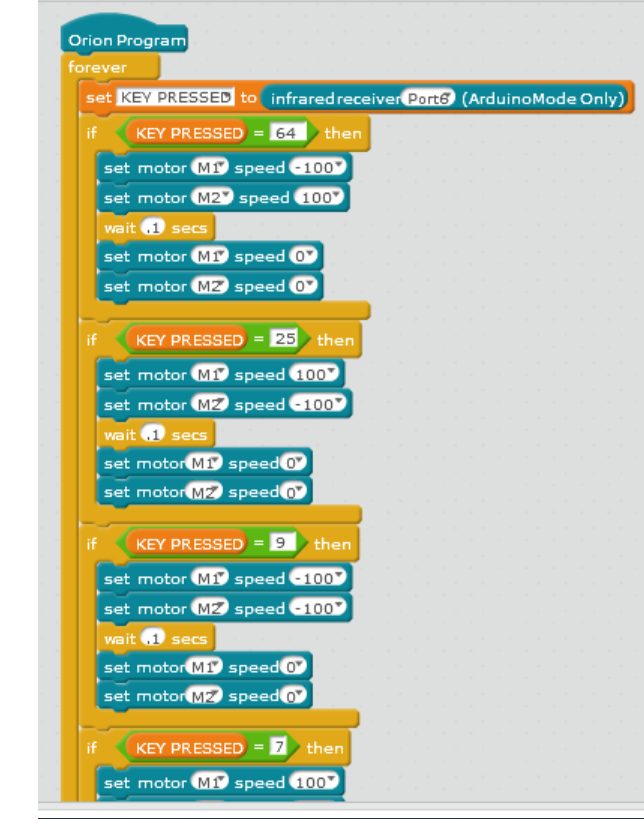
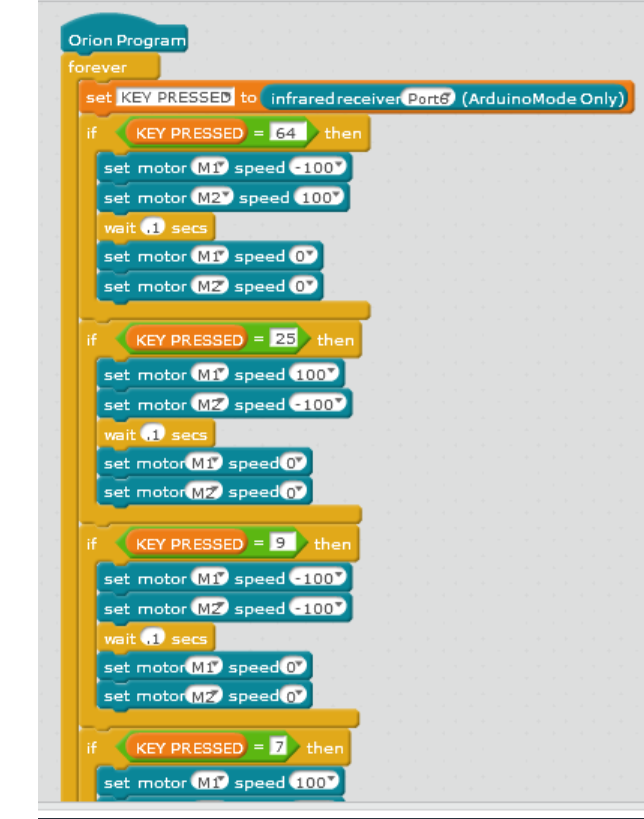
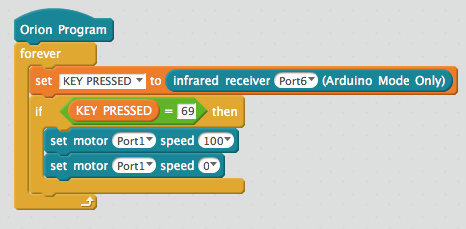
In the past version, I could use the tags for "if key (up arrow) pressed, then (move both motors forward). Currently, I can only find a way to program for keys 1-4 (if port 6 key 1 pressed, then…), and none of them work. Am I missing something?
I’m working with the IR Starter robot (Me Orion). Current extensions are Arduino, Makeblock, and Communication. Firmware is up-to-date.