I just finished building the Robotic Arm Tank and am trying to determine if the board/modules may be DOA or if I am just missing some other component/process. I am able to communicate with the MegaPi through USB in order to both Upgrade Firmware and Reset. I see both red LEDs for PWR on the board and another on the RJ25 shield. I also see the periodic blue LED blinking on the MegaPi board itself.
I have tried powering two ways, one with 6 x AA batteries, and the other through the USB Serial Port.
Bluetooth not active?
In either case the Bluetooth module only lights blue once when the board is first rest, after that it never shows any other illumination. When looking for devices to pair, I have not seen any device on either my Andriod phone or my Surface tablet.
Motors not active?
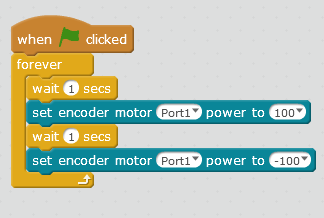
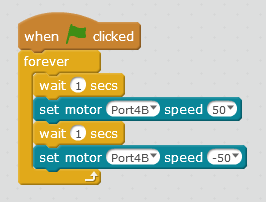
When I try to send a simple Sketch to test either the encoded motors or the DC arm, I do not get any response at all. No sounds, no illuminations.
The only thing I can confirm is that when running the Sketch I can see TX and RX bytes being sent through the Serial Port (watching in Arduinio Mode).
Any suggestions on how I can best diagnosis components on the board to determine if they are receiving adequate power or signals? Is there anything else I may be missing? I have tried both Upgrading and Resetting the Firmware. In addition I even compiled the latest firmware from github and Uploaded it to the device through Ardunio IDE.
I am new to makeblock electronics, however have a very strong background in software development.