Ok I tried that. I think an issue with your code is the baud rate - it might be that 115200 works.
I also could not get the mBot to receive strings using Scratch, however single bytes worked.
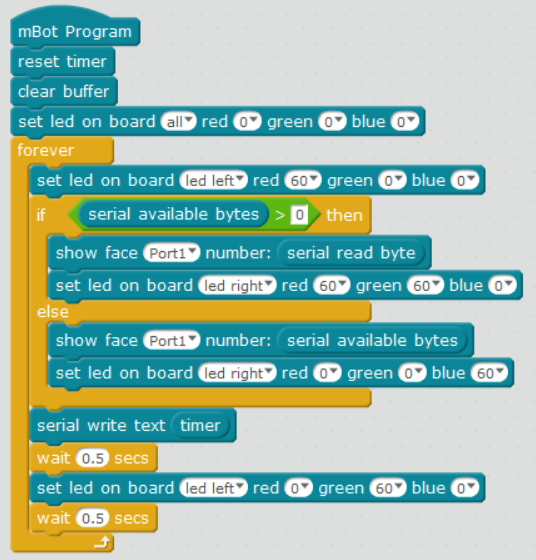
So the code below receives one byte per second and displays its value in decimal on the LED matrix.
Right LED turns yellow when data is available, blue otherwise.
Left LED just blinks to indicate the program is running.
The mBot sends the timer as a string each second through serial.
Please note that the mBot will use thatever is connected to serial … that can be something on USB or bluetooth (I used the usual Bluetooth module, not the RJ25 version)
I used this as MIT App Inventor Code on the Android:
BTArduinoClient2Devices_ahu.zip (3.1 KB)
You will need to pair the mBot with the Android device using the Bluetooth settings 1st, then connect within the app.
Funny thing is that when you send a string, the mBot side will pull them one by one and display the numeric byte value, each for a second.
I also attached the mBot code.bluetest_arduino.sb2 (76.1 KB)
I noticed that this does not seem to work in online mode, only in Arduino mode.