Hi All,
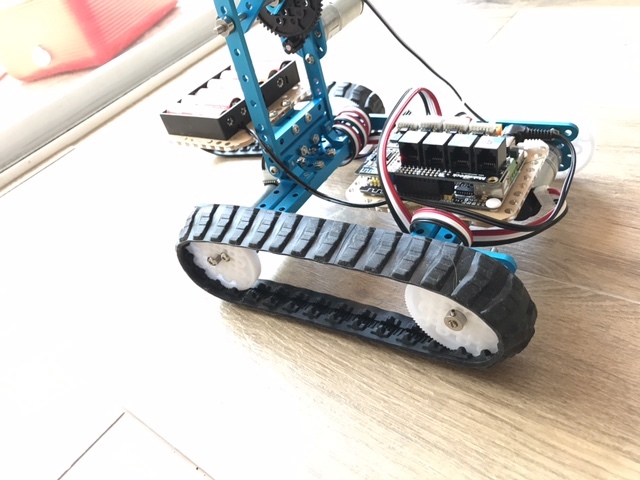
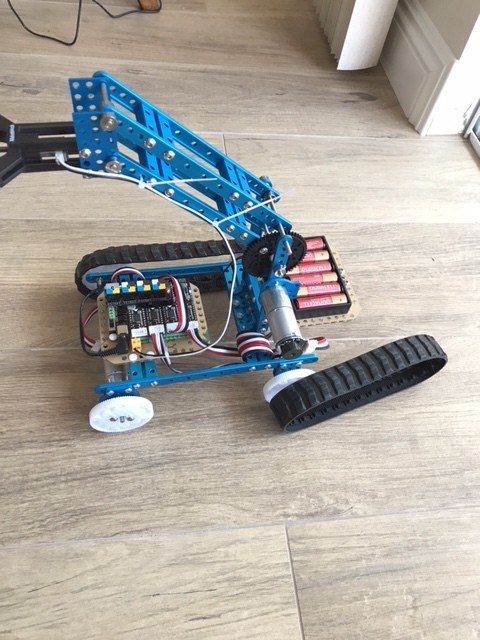
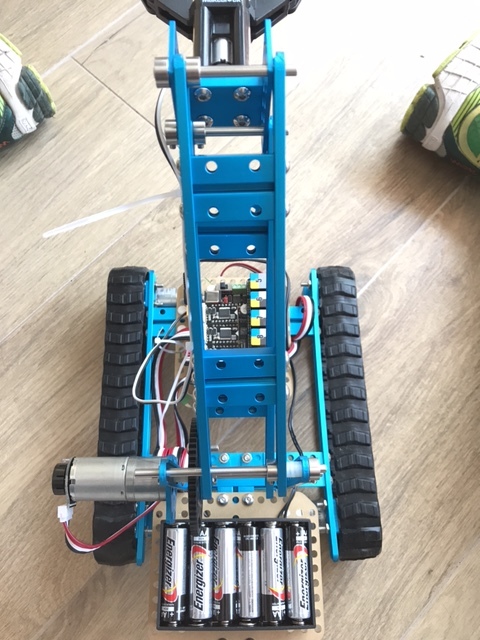
I just got the robotic arm tank assembled. When I try to run it, the movement is interrupted, and when it does move, the tank treads peal off. I double checked the hole positions for the wheels and motors and it all looks good.
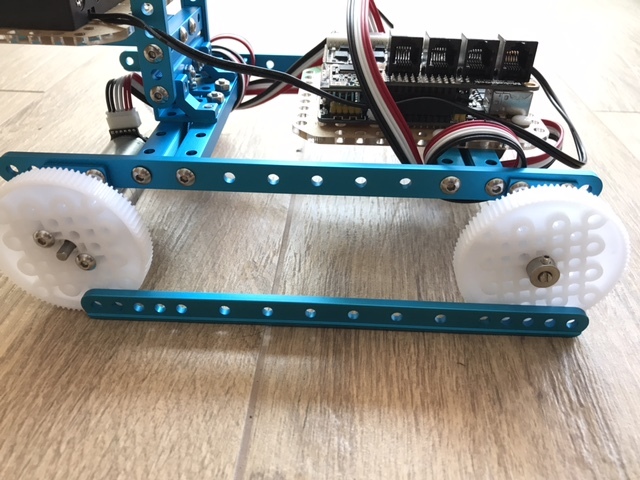
I did not see any details regarding the wheel spacing off of the axel. The free wheels use spacers to locate the final position, but the wheels with motors have no spacers. I used a straight edge to align the motored wheels with the free wheels. This still does not seem to solve my problem.
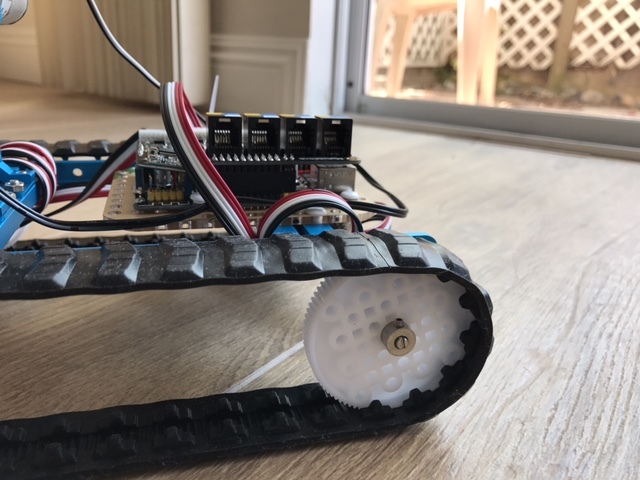
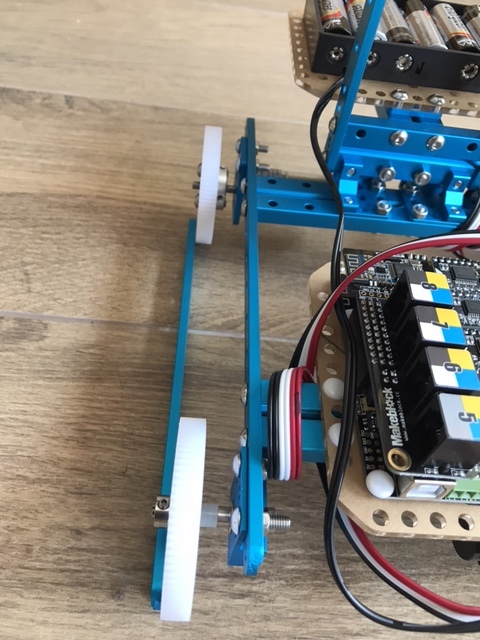
I tested the build with the tracks off, and all motors work fine and robotic arm works fine. Looking at the pics I took of the tread assembly, I noticed the beam that supports the wheels is bowing and under a bit of stress.
Not sure if this is an issue of cheap parts, or improper assembly, although there were no detailed instructions or warnings regarding the tread assembly. I double checked wheel positioning and it is just as the instructions state; One free hole open on the front, and two in the back
I have included pictures to anyone who can help. I am currently unable to upload video in the format for this thread. I like the robot, but am a little disappointed at this issue and quality after paying over $300 for the kit.
Any help would be greatly appreciated.